
资料下载


消毒机器人开源项目
刘强
分享资料个
描述
介绍:
消毒机器人的概念来源于喷雾门或被称为消毒门的概念。如今,许多国家都使用喷雾门,认为它可以通过在进入任何地方之前对人员进行消毒来防止冠状病毒的传播。
最终,世界卫生组织(WHO)表示:“在全身喷洒酒精或氯不会杀死已经进入身体的病毒”;因此,这无助于控制冠状病毒病例。此外,世卫组织还提到,喷洒这些物质可能对衣服或眼睛和嘴巴造成危险,但有利于表面消毒;因此,在每个人都接触到表面时,对表面进行消毒比对人进行消毒更重要。因此,对人周围的物体进行消毒将消灭其上的任何病毒,控制病毒的传播,保护人们。
因此,有几种方法可以对周围环境进行消毒;例如,让一群人用消毒枪进行消毒。然而,这可能是一个昂贵的过程,因为消毒必须是冠状病毒病例的日常过程,如果是商场、大学或其他大型场所,对整个地方进行消毒可能需要时间。因此,消毒机器人被编程为自动对各处进行消毒;当一个人打开按钮时,它会四处移动并旋转,因为它包含设法不撞到任何东西的传感器。此外,消毒机器人可以在多个地方使用;例如商场、咖啡厅、学校、大学、医院,也可以在家里使用。
材料
为了建造机器人,需要一些材料和制造方法。材料的选择是为了达到设计要求。我们选择了经济实惠的材料来满足我们的原型设计要求(可负担性)。
- 4P3 电源 2200mAh 12V 锂电池
数量:1
来源:电子商城
价格:950 埃及镑
- 锂电池充电器3s
数量:1
来源:电子商城
价格:350 埃及镑
- 微型金属齿轮电机 HP 6V 298:1
数量:2
来源:电子商城
价格:190 埃及镑
- 微型金属齿轮电机支架对
数量:1
来源:电子商城
价格:50 埃及镑
- 轮子 42×19mm 一对
数量:1
来源:电子商城
价格:30 埃及镑
- Arduino纳米板
数量:1
来源:电子商城
价格:110 埃及镑
- 面包板
数量:1
来源:电子商城
价格:30 埃及镑
- HL-52S 继电器模块
数量:1
来源:电子商城
价格:40 埃及镑
- H 桥 L298 双电机驱动器
数量:1
来源:电子商城
价格:65 埃及镑
- 锐距传感器 GP2Y0A41SK0F (4 - 30cm)
数量:3
来源:电子商城
价格:100 埃及镑
- 电动泵
数量:1
来源:电子商城
价格:150 埃及镑
- 水传感器
数量:1
来源:电子商城
价格:35 埃及镑
- 热收缩
来源:电子商城
价格:15 埃及镑
- 发光二极管
数量:2
来源:电子商城
价格:5 埃及镑
- 开/关
数量:1
来源:电子商城
价格:2.50 埃及镑
- M3螺栓(直径3mm)
数量:20
来源:电子商城
价格:10 埃及镑
- M3螺母
数量:20
来源:电子商城
价格:10 埃及镑
- #8-32 螺丝
数量:2
来源:电子商城
价格:2 埃及镑
总成本 = 2, 544.5 EGP
材料选择:
解放军:
这种热塑性塑料价格实惠,也是选择它的最重要原因,它不会被氯和酒精等清洁消毒剂腐蚀。
我们选择这种类型的一些特点:
- 它是一种热塑性塑料
如果发生任何错误,重新加热材料,它可以重新成型。
- 易于打印
由于温度灵活,翘曲很小,并且以其打印质量而闻名。
- 环保塑料
具有良好的生物降解性,在水中48个月生物降解,工业作曲家50天生物降解。
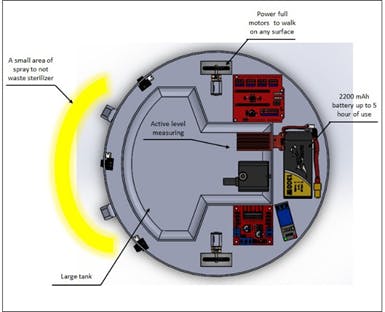
该设计:
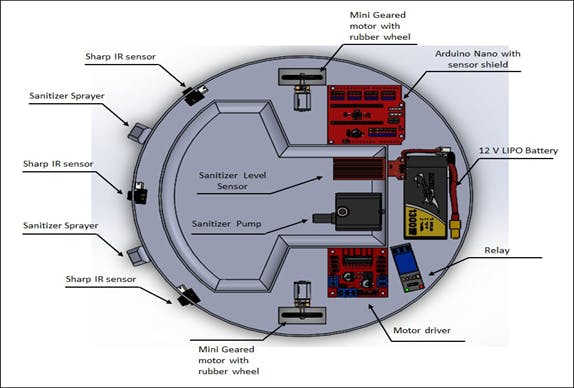
规格
o 大型灭菌罐 0.5 L
o 强大的电机帮助机器人在任何表面上移动
o 2200 mAh 大电池,可保持运行 5 小时
o 灭菌罐空时自动关闭
o 消毒喷雾器覆盖机器人下方的整个区域
o 3 个红外传感器,可在室内自主移动
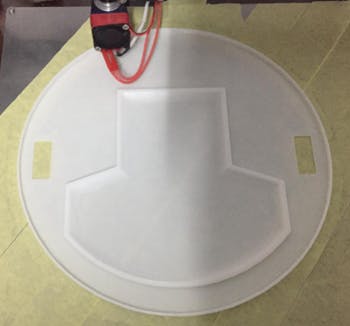
制造工艺
® 设计完成后,所有部件都可以进行 3D 打印。
® 机器人由两部分组成。
® 打印设置:
0.32 毫米层高
1.2 毫米外壳厚度
30% 填充密度
190°C印刷温度
支持类型无处不在
回缩:50 毫米/秒 0.7 毫米
打印速度 60mm/s
集会:
集成CAD设计,组装整个机器人仅需30分钟。
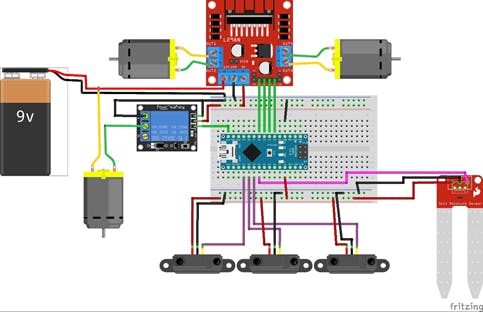
电路组装
使用面包板或 DIY 工艺 PCB 如下所示组装电路
阿杜诺:
- 从锐距传感器接单
- 给H桥下达命令
泵
- 通过继电器间接接受 Arduino 的订单
水传感器
- 接受坦克的订单
- 给阿杜诺下订单
尖锐的距离传感器
- 接受周围的订单
- 给阿杜诺下订单
H桥
- 接受 Arduino 的订单
- 给电机下订单
开/关
- 听命于人
这个怎么运作?
- 移动
1. 当前面和侧面的锐利红外传感器感应到附近有任何东西时,它会向Arduino发出命令向左或向右移动。
2. Arduino 然后发送 H 桥命令。
3. H桥然后将其发送到电机。
4. 然后它改变方向。
- 消毒液完成
1.水传感器向Arduino发送命令
2.当传感器信号低于阈值时,表示罐内液位低。
3. 继电器关闭泵。
4. 泵将停止喷涂。
- 当机器人移动时,泵会不断喷洒消毒剂。
Arduino代码
//Distance Analog Sensors (Sharp)
const int SD1 = 2; //left sensor
const int SD2 = 1; //right sensor
const int SD3 = 4; //front side sensor
const int SD4 = 3; //front side sensor
// fluid sensor
const int tank_level = 5; //fluid sensor
// Define motor pins
#define in1 6
#define in2 7
#define in3 4
#define in4 5
const int pump = 3; // Pump relay pin
int green_led = 12; // geen led indicator
int red_led = 9; // red led indicator
void setup() {
// define motor pins as OUTPUT
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
// define led indicator as output
pinMode(green_led, OUTPUT);
pinMode(red_led, OUTPUT);
// define sharp ir sensor as input
pinMode(SD1, INPUT);
pinMode(SD2, INPUT);
pinMode(SD3, INPUT);
pinMode(SD4, INPUT);
// define pump as an output
pinMode(pump, OUTPUT);
// start serial comunication to print sensor values
Serial.begin(9600);
}
// turn the robot left
void left() {
digitalWrite ( in1 , HIGH);
digitalWrite ( in2 , LOW);
digitalWrite ( in3 , HIGH);
digitalWrite ( in4 , LOW);
digitalWrite ( red_led , HIGH);
digitalWrite ( green_led , LOW);
}
// go back
void back() {
digitalWrite ( in1 , HIGH);
digitalWrite ( in2 , LOW);
digitalWrite ( in3 , HIGH);
digitalWrite ( in4 , LOW);
digitalWrite ( red_led , LOW);
digitalWrite ( green_led , LOW);
}
// go forward
void forward() {
digitalWrite ( in1 , LOW);
digitalWrite ( in2 , HIGH);
digitalWrite ( in3 , HIGH);
digitalWrite ( in4 , LOW);
digitalWrite ( green_led , HIGH);
digitalWrite ( red_led , LOW);
}
// turn right
void right() {
digitalWrite ( in1 , LOW);
digitalWrite ( in2 , HIGH);
digitalWrite ( in3 , LOW);
digitalWrite ( in4 , HIGH);
digitalWrite ( red_led , HIGH);
digitalWrite ( green_led , LOW);
}
// stop the robot
void STOP() {
digitalWrite ( in1 , LOW);
digitalWrite ( in2 , LOW);
digitalWrite ( in3 , LOW);
digitalWrite ( in4 , LOW);
}
void loop() {
// start to read data from ir sensor
float volts_front_1 = analogRead(SD3) * 0.0048828125; // value from sensor * (5/1024)
int dist_front_1 = 13 * pow(volts_front_1, -1); // worked out from datasheet graph
//**********************
float volts_front_2 = analogRead(SD4) * 0.0048828125; // value from sensor * (5/1024)
int dist_front_2 = 13 * pow(volts_front_2, -1); // worked out from datasheet graph
//**********************
float volts_right = analogRead(SD2) * 0.0048828125; // value from sensor * (5/1024)
int dist_right = 13 * pow(volts_right , -1); // worked out from datasheet graph
//**********************
float volts_left = analogRead(SD1) * 0.0048828125; // value from sensor * (5/1024)
int dist_left = 13 * pow(volts_left , -1); // worked out from datasheet graph
Serial.println(dist_front_2);
//Serial.println(sdSHARP(SD2));
if (dist_front_1 && dist_front_2 > 8) { // go forward
forward();
// turn the pump on
digitalWrite(pump, HIGH);
Serial.println ("forward");
}
if ( dist_front_2 < 5) {
right();
// turn the pump on
digitalWrite(pump, HIGH);
Serial.println ("rigth ");
}
if ( dist_front_1 < 5) {
left();
// turn the pump on
digitalWrite(pump, HIGH);
Serial.println ("left");
}
else {
}
//delay(100);
}
结论
机器人是非常重要的发明,它可以在不伤害任何人的情况下清洁地方。它不消耗时间,也不需要专家来操作它。
这个机器人可以是任何尺寸,但我们所做的尺寸允许我们将它移动到任何地方并且可以随身携带。此外,它是一种低成本的发明,任何人都可以拥有它;即使在家里。


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




