
资料下载


使用HC12无线模块的Arduino履带机器人
王萍
分享资料个
描述
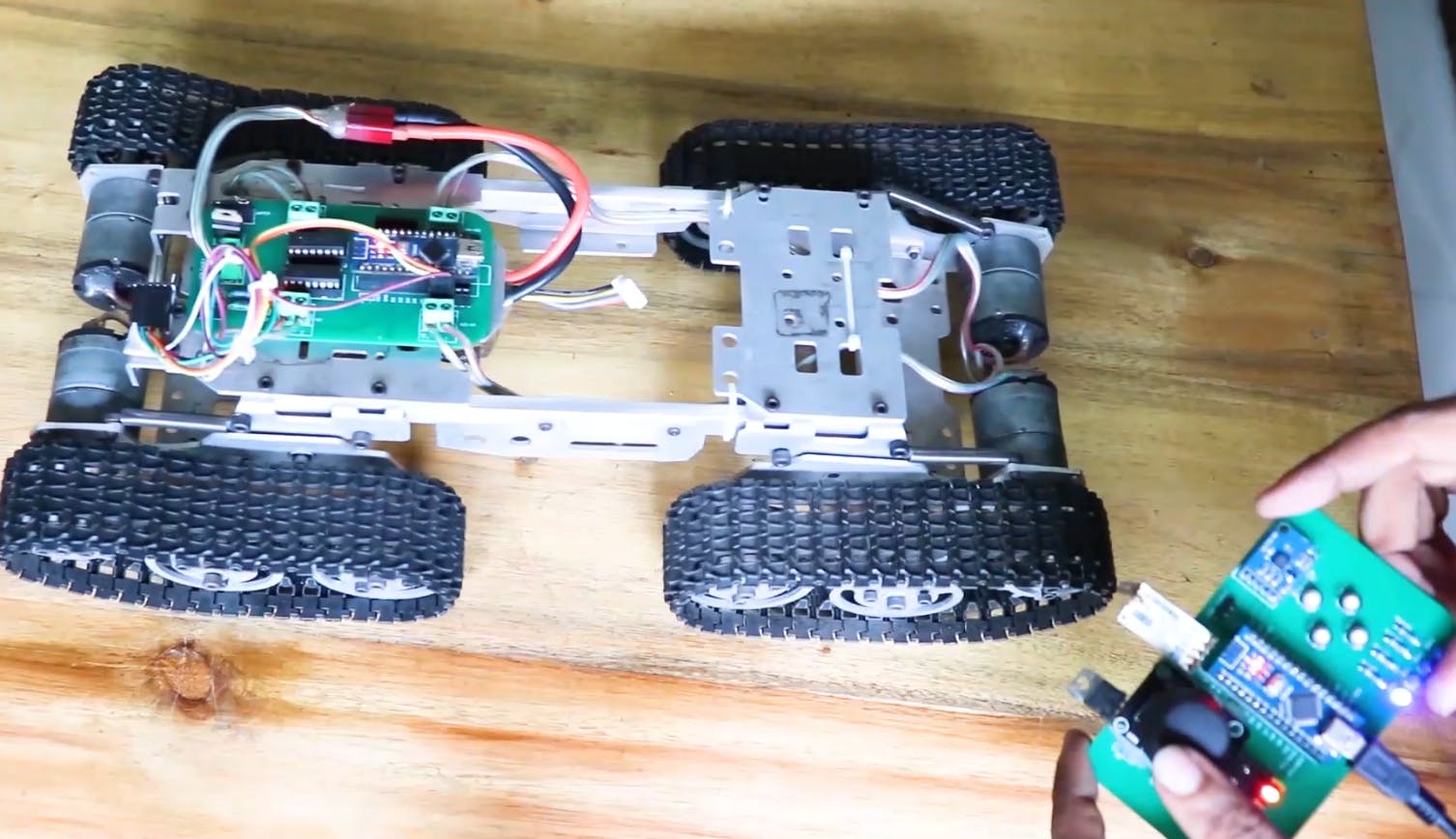
遥控坦克
这次我有一个带有 4 轮驱动和专用悬架的崎岖地形机器人,它可以在崎岖的地形上行驶。一探究竟。
为什么不为自己建造一个?在这里,我们将学习如何构建越野无线多用途 4 轮驱动Arduino履带机器人,以便在崎岖地形上平稳行驶 - 带悬挂的 DIY 崎岖地形无线履带车。
我们将为您提供设计、代码、电路图和链接,以购买您自己的机器人套件、底盘和用于该项目的传感器模块。
HC12
HC 12 是一款非常便宜的远程无线模块,可用于长达 1.7 公里的长距离无线串行通信。该模块非常紧凑轻巧且对面包板友好,这使其成为我们项目的最佳无线控制器。
测试 HC12 连接
#include
操纵杆
这是使用最广泛的机器人控制器,附带各种机器人 DIY 套件,可与arduino 一起使用。设计非常简单,非常易于使用。它使用两个电位器来计算 x 轴和 y 轴的运动,并使用一个开关来感应按钮按下。
这可以很容易地连接到arduino的模拟引脚并直接读取模拟值。
下面提供了用于测试操纵杆的代码。随意根据您的需要下载/编辑它。
在上传主代码之前,请确保您的操纵杆使用此代码工作。从上面的链接下载代码。在这个例子中,我们所做的只是使用 arduino 的模拟引脚(A0、A1、A2)从操纵杆收集数据模拟输出。这些值存储在变量中,稍后打印在串行监视器上
我们将本教程分为 2 个部分 -遥控器和机器人
1-遥控器
发射器由一个面包板组成,我们在其中安装了所有传感器和组件,以获取用于驱动越野无线监控 6 轮驱动机器人的数据。这包括一个加速度计、一个操纵杆和一个 HC12 模块。
我们将使用加速度计和操纵杆来控制越野机器人。现在,我们将使用操纵杆按钮来关闭机械手。来自这些传感器的数据使用 HC12 模块无线传输到DIY 机器人。
在上一篇文章中,我向您展示了如何使用 HC12 无线模块、操纵杆和加速度计制作遥控器。我们也可以为这个项目使用相同的遥控器。单击此处了解有关HC12 遥控器的更多信息。
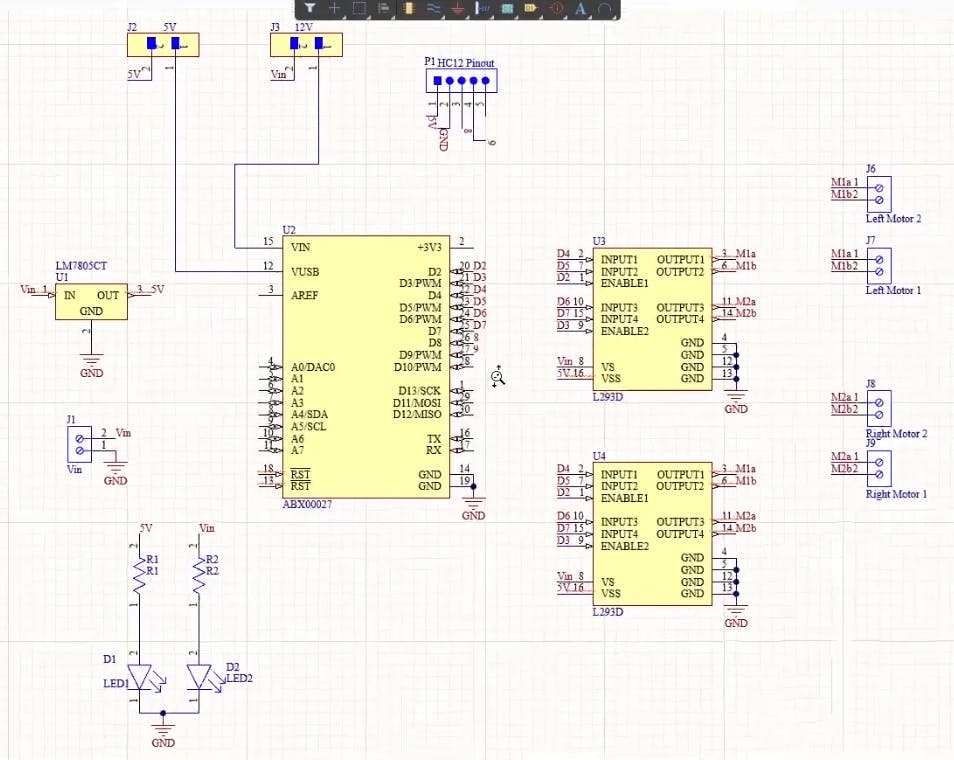
电路解释
现在让我们看看我们的电机驱动板的电路。看起来有点乱?别担心,我会为你解释的。
原理图
为您的项目设计您自己的 PCB!
我使用 Altium Designer 绘制电路并设计 PCB。它是一个强大的工具,可用于为我们的项目设计和创建我们自己的 PCB,以及用于工业用途的复杂和多层 PCB。
如果你是一个 DIY 电子爱好者,我敢打赌这对你们来说真的很有用。在过去的 3-4 年里我一直在使用它,让我告诉你们,这太棒了!您可以从这里下载Altium PCB Designer的免费试用版。
使用 Altium 的 PCB 设计教程
查看以下视频,开始设计您自己的 PCB
在这里,我设计了一个 PCB 布局,您可以在其中轻松安装Arduino Nano 33 IOT、L293D IC 和支持组件,并在不使用杂乱的电线和电缆的情况下进行设置。该板重量轻,可使用 9V 电池或 9-12 V 电源适配器供电。
我们需要为整个电路加电并使用 L293D/L298N 电机驱动器和我们的 Arduino 板驱动所有 4 个电机。我们需要一个能够提供足够电流的电源。所以,我决定使用 12V 锂聚合物电池。
输入电源连接到 7805 稳压器。7805 是一款 5V 稳压器,可将 7-32V 的输入电压转换为稳定的 5V 直流电源。各个点都有 LED 指示灯,便于故障排除。您可以使用 7805 稳压器的 12V 或 5V 稳压输出为 Arduino 供电。您可以使用跳线进行选择。
为 Arduino 供电取决于您使用的电路板类型。在这里,我使用的是 Arduino Nano 33 IOT,它的 Vin 引脚可以承受 12V 的电压。并非所有板都如此。如果我直接连接这个 12 V,它可能会烧坏芯片。因此,如果您愿意,您可以使用稳压器将电压降至 5V,然后再将其馈送到 Arduino。现在我们来看看软件部分
第 3 步 - 创建 PCB 布局
接下来,设计PCB。PCB Layout实际上是PCB设计的重要组成部分,我们使用PCB Layout从原理图制作PCB。
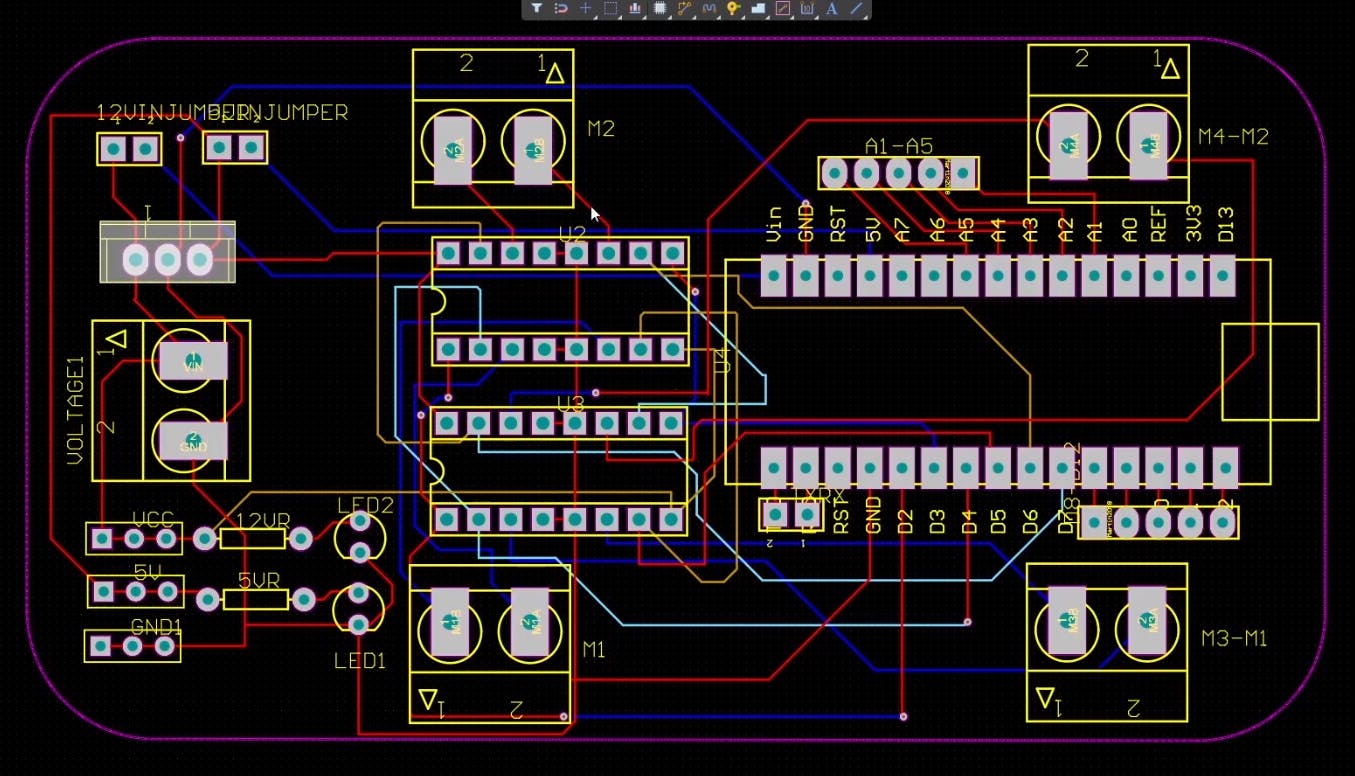
我设计了一个可以将所有组件焊接在一起的 PCB。
从那里您将被引导到一个表格,您可以在其中提供更详细的董事会详细信息。在 PCB 规格屏幕中更新您的电路板信息。在下一个屏幕中,您应该能够上传 Gerber 文件并提交以供审核。审核完成后,剩下的就是添加到购物车,付款,然后等待您的 PCB 到达。
拿到 PCB 后,您所要做的就是焊接接头引脚和所有其他组件。
完成后,连接电源适配器,您会看到 LED1 会亮起。这意味着它正在工作。
第 6 步 - 编码
现在,让我们进入软件部分。在这里,我将使用我们最喜欢的 Arduino ide 对电路板进行编程。
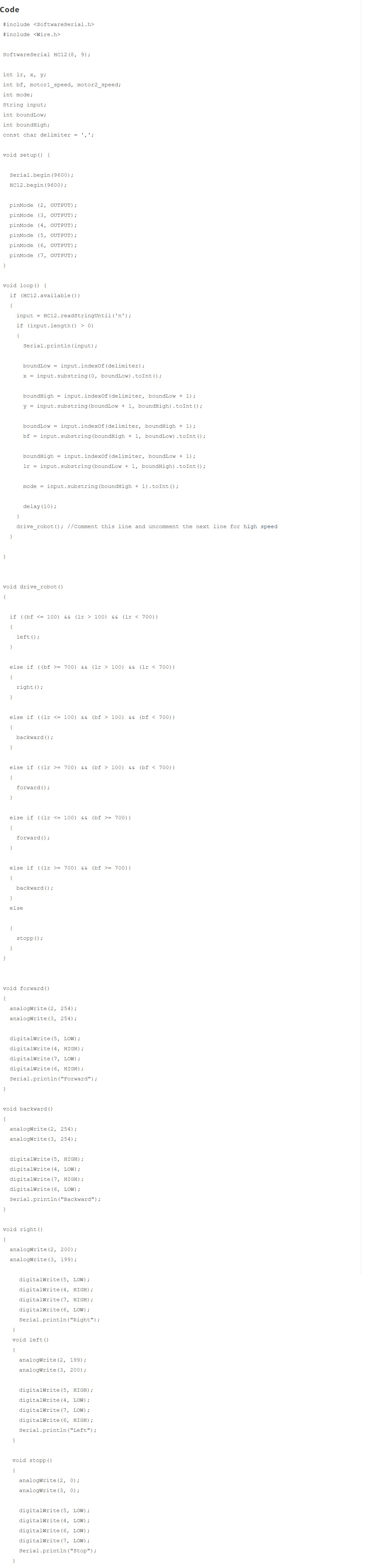
这是您的 Arduino 履带机器人的代码。您可以从此处复制并粘贴完整的Arduino Tank 代码及其说明。
试驾DIY遥控坦克
就是这样,现在您所要做的就是选择正确的端口和板并上传代码。
现在你的机器人已经准备好采取一些行动了,为什么不把它带出去兜风呢?
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





