
资料下载


×
蓝牙控制的Arduino机器人
消耗积分:0 |
格式:zip |
大小:0.01 MB |
2023-06-27
14230
分享资料个
。
代码
#include
SoftwareSerial bt(10,11); // assigning 10 as RX ans 11 as TX
#define motor_left 5
#define motor_right 3
#define motor_right_dir 2
#define motor_left_dir 4
void setup() {
pinMode(2,OUTPUT);
pinMode(3,OUTPUT);
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
while(!Serial){;} // waiting for serial communication to setup
bt.begin(9600); // beginning the bluetooth connection
}
void loop() {
bt.listen(); // listening to the bluetooth
while(bt.available()) // till we are receiving the input continue in the loop
{
char ch = bt.read(); // reading one character at a time
if(ch=='f'){ // action to be performed if input is 'f'
digitalWrite(motor_left_dir,HIGH);
digitalWrite(motor_right_dir,HIGH);
analogWrite(motor_left,150);
analogWrite(motor_right,150);
}
else if(ch == 'b'){ // action to be performed if input is 'b'
digitalWrite(motor_left_dir,LOW);
digitalWrite(motor_right_dir,LOW);
analogWrite(motor_left,150);
analogWrite(motor_right,150);
}
else if(ch == 'l'){ // action to be performed if input is 'l'
digitalWrite(motor_left_dir,HIGH);
digitalWrite(motor_right_dir,HIGH);
analogWrite(motor_left,0);
analogWrite(motor_right,120);
}
else if(ch == 'r'){ // action to be performed if input is 'r'
digitalWrite(motor_left_dir,HIGH);
digitalWrite(motor_right_dir,HIGH);
analogWrite(motor_left,120);
analogWrite(motor_right,0);
}
else if(ch =='s'){ // action to be performed if input is 's'
digitalWrite(motor_left_dir,HIGH);
digitalWrite(motor_right_dir,HIGH);
analogWrite(motor_left,0);
analogWrite(motor_right,0);
}
}
}
电路组装
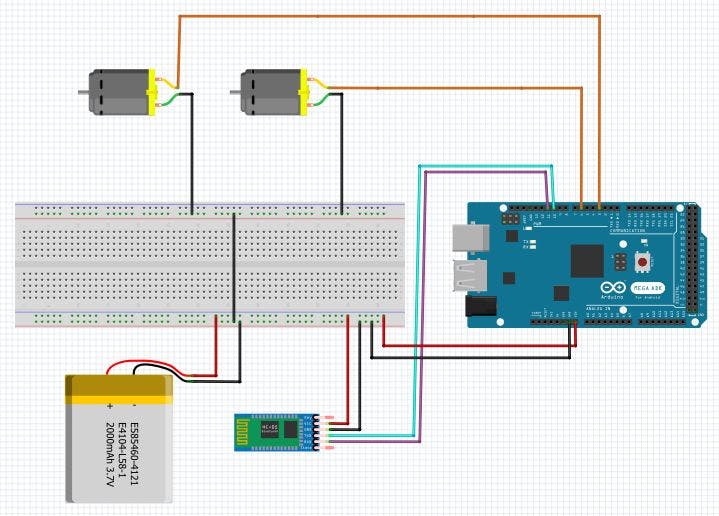
用于蓝牙控制的 Arduino 机器人汽车的电路组件
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




