
资料下载


使用麦克纳姆轮子构建和控制全向汽车的过程
laisvl
分享资料个
描述
概述
在这个项目中,我将展示我使用麦克纳姆轮子构建和控制全向汽车的过程。该车将由无线 PS2 控制器控制,包括用于速度指示的 LED、小型压电喇叭和用于物体检测的 HC-SR04 传感器。
底盘_
我使用的底盘以套装形式出售(EMOZY 麦克纳姆轮机器人套件)并在亚马逊上购买。
这包括:
- 四个麦克纳姆轮
- 四个带齿轮箱的直流电机
- 两个底盘板
- 僵局
然而,自己收集零件相当容易,Adafruit 销售非常相似的电机和变速箱。
只需确保车轮可以与您购买的电机配合使用。底盘板可能有点难以获得。
集会
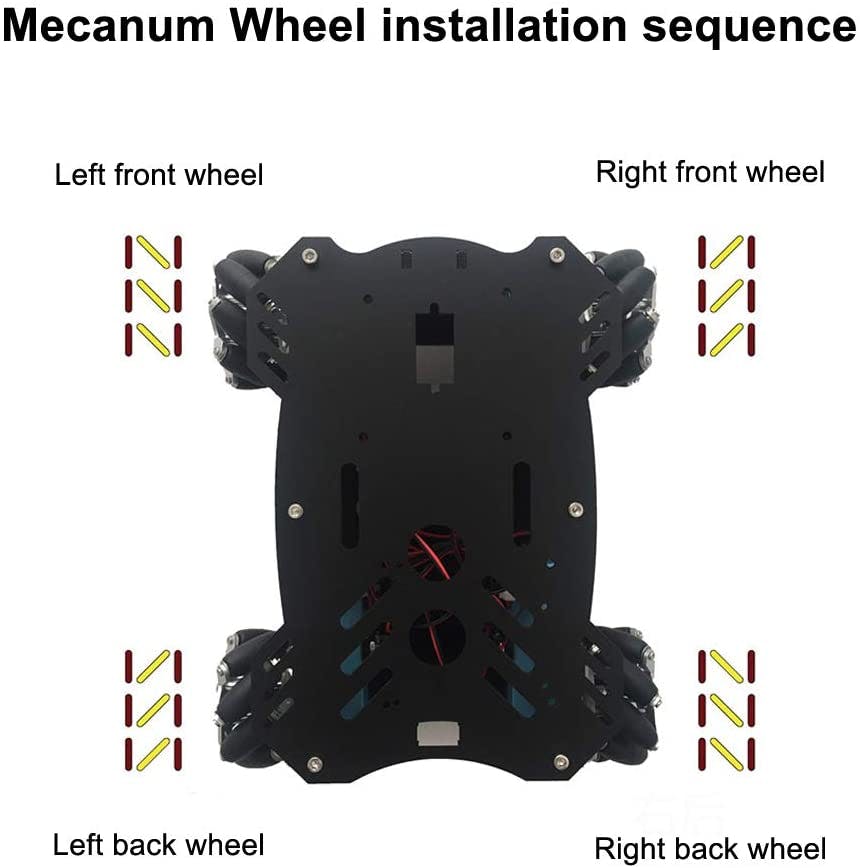
如果您的电机没有附带电机引线,我首先建议您焊接电机引线。哪条线索去哪里并不重要,只要确保线索足够长,适合您的用例。如果您使用的是底盘套件,按照说明进行组装相当容易。请记住,轮子需要沿着特定的方向行驶,其中两个轮子用于右侧,两个用于左侧。这张照片应该有帮助。
我还包括一个从 pololu 机器人 购买的额外底盘板,用于容纳 Arduino 和面包板。这是可选的,但额外的空间值得赞赏。
我使用 M3 支架安装了顶板。这为电池组和 PS2 控制器接收器腾出了空间。
安装硬件
我使用的硬件包括:
- Arduino UNO
- Adafruit 电机护罩 V2
- 电子-沙龙端子屏蔽
- Lynxmotion PS2 接收器分线板。
- 6 X AA 电池组,带筒形插孔连接器
- 两个用于 LED 和压电的 400 点面包板
- 开/关
我首先将电池组贴在中间板上。重要的是要确保在汽车行驶时它不会移动太多。我还按下了旁边的开/关开关。然后将 PS2 分线板安装到顶板的下侧。Arduino Uno(连同两个防护罩)使用 M2.5 支架连接到顶板。我还将两个面包板连接到顶板上。HC-SR04 模块使用随附的安装硬件连接到汽车的前部和后部。方便地,EMONZY 底盘板带有与 HC-SR04 安装支架相匹配的螺丝孔。有很多方法可以将所有这些物品安排在车上,可能比我做的更好,但它对我有用。
接线
我附上了整辆车的接线图,但它很忙。下面是 Arduino 和电机护罩上所有东西的接线位置的细分。
直流电机:
电机屏蔽端子 M1 至 M4:正极和负极端子。(无需使用 GND 端子)
我建议在开始之前查看电机护罩上的 adafruits 文章。很多很棒的信息。
同样对于大多数直流电机,很难分辨出接线的方向。建议单独测试每个电机,如果运行方向错误,则更换接线。
PS2 接收器突破:
DAT -> 引脚 12
CMD -> 引脚 11
ATT -> 引脚 10
时钟 -> 引脚 13
5V -> 5V
接地 -> 接地
HC-SR04:(我向您展示了代码使用的引脚,但可以连接到任何数字引脚)
前传感器 -
接地 -> 接地
回声 -> 引脚 2
触发 -> 引脚 3
VCC -> 5V
背部传感器 -
接地 -> 接地
回声 -> 引脚 4
触发 -> 引脚 9
VCC -> 5V
红色 LED:
阳极 -> 引脚 7
阴极 -> GND
黄色 LED:
阳极 -> 引脚 6
阴极 -> GND
绿色 LED:
阳极 -> 引脚 5
阴极 -> GND
蓝色 LED:
阳极 -> 引脚 1
阴极 -> GND
*注意:我通常不会使用引脚 1,但我没有引脚。因为引脚 1 和 0 用于串行通信,所以您不能使用串行库。如果您确实需要使用串行库,请考虑去掉这个 LED。
佩佐:
引脚 8 和 GND
控制方案:

已完成项目:
如何改进这个项目:_
- 更清洁的布线(可能使用焊接原型板)
- 更多用于侧面物体检测的 HC-SR04 传感器
- 编码器有助于解决车轮打滑问题
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




