
资料下载


迷你视频录制和流媒体机器人开源分享
张浩
分享资料个
描述
这个机器人一直是我的梦想,现在终于完成了!
特征:
- 在可调节的时间内录制视频
- 将视频流式传输到浏览器窗口
- 超小尺寸
- 超声波传感器控制 - 完全独立
- 全地形设计
补给品:
- Raspberry Pi 零 W -在 Adafruit
- Arduino Nano -在纽瓦克
- TT 变速箱电机 -在 Adafruit
- 超小纸箱
- 公/母跳线 -在纽瓦克
- 母/母跳线 -在纽瓦克
- 公/公跳线 -在这里 - 你猜对了 - 纽瓦克
- DRV8833 电机驱动器 -在 Adafruit
- Raspberry Pi 摄像头模块 -在纽瓦克
- 滑动开关 -在纽瓦克
- 9V电池
- 9V 电池夹 -再次来到纽瓦克
- USB 锂离子电池充电器 -在 Adafruit
- 2 节锂离子电池 1000mAh -在纽瓦克
- 脚轮 -在 Adafruit
- Raspberry Pi 零到相机适配器带状电缆 -在 Adafruit
- USB 到 Micro-B 电缆 -在 Ebay 上
应用:
- Raspberry Pi OS -在 Raspberry Pi
- Arduino 创建网络编辑器 -在 Arduino
工具:
第 1 步:底盘设计
这就是 3D 打印机的用武之地。如果需要,您可以为您的盒子打印底盘。
首先,拿出你的热胶枪并将其加热。(别担心,热胶只是暂时的。)加热后,拿你用来做底盘的任何东西,然后把 TT 电机粘在上面。然后,将盒子粘在上面。
第 2 步:电池安装
使用双面胶将 9v 电池固定在侧面,并使用另一个将 3.7v 电池固定在侧面。将 2 根普通跳线放入 3.7v 电池孔中。将 2 个 MF 跳线放在 9v 电池线上。在盒子的侧面钻一个孔,然后将 3.7v 电池线穿过。
3.7v 电池用于 Arduino,9v 电池用于电机。
第 3 步:电机驱动器安装
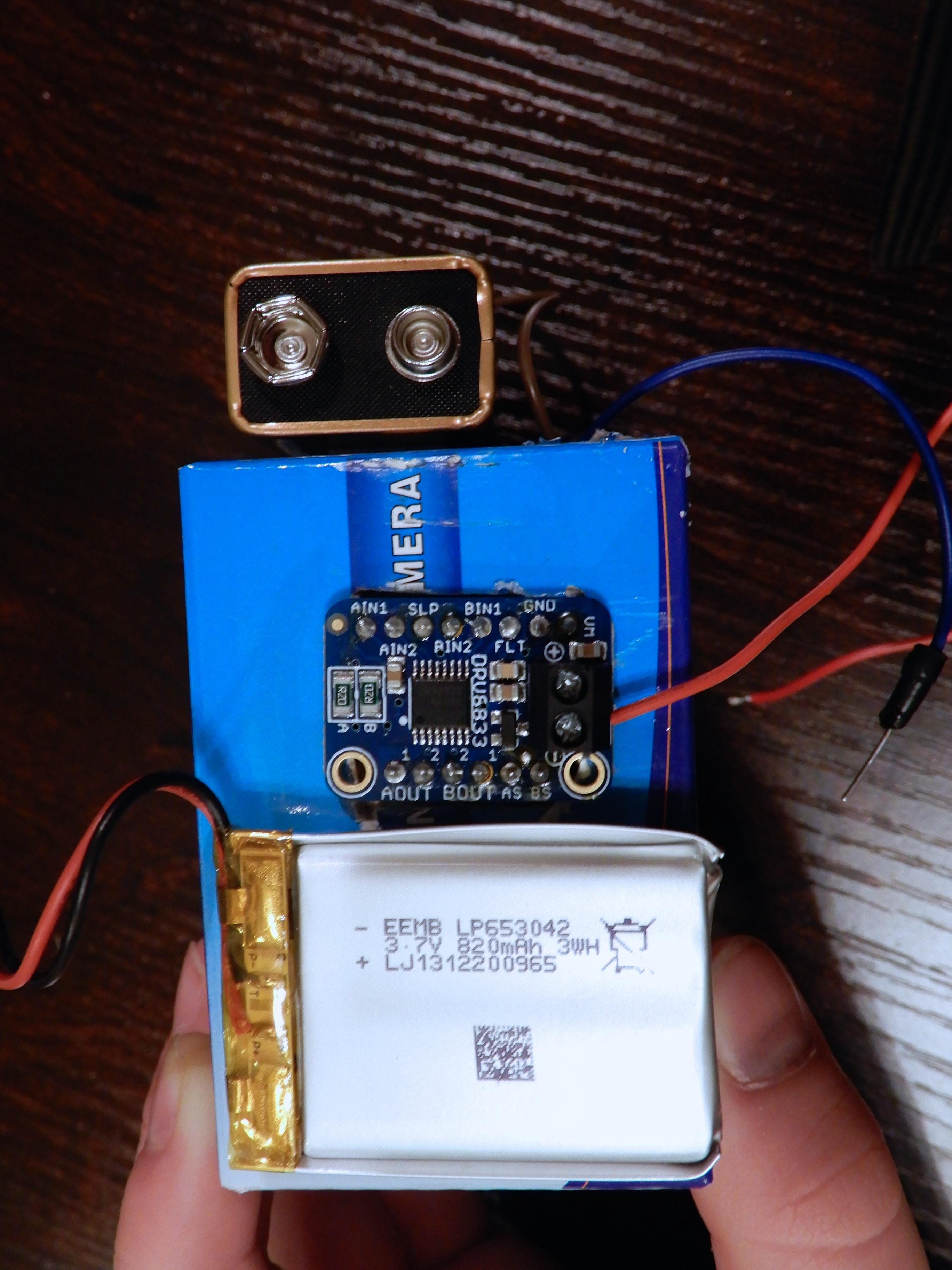
用旋转工具在盒子上切一个 DRV8833 大小的孔。(我建议你测量它。)
将 DRV8833 热胶粘在边缘周围。我说热胶是因为你可能需要做出改变。
第 4 步:传感器安装
拿起你的 HC-SR04 并测量它。得到长度和宽度,然后在机箱外壳上画出相应距离的线,制作切割模板。
使用旋转工具切割线条。
将超声波传感器穿过孔。如果合适的话,太好了!如果不是,请相应调整。确保“光束”没有被阻挡。
像使用 DRV8833 一样在它周围粘上胶水。
第 5 步:接线
这是最难的部分。
因为线太多,所以我没有做电路图,但下面的列表显示了引脚编号。
引脚编号:
- 将您的 HC-SR04 触发到引脚 9
- HC-SR04 的回声到引脚 10
DRV8833 引脚:
- AIN1 到引脚 4
- AIN2 到引脚 5
- SLP 至 3.3V
- BIN2 到引脚 6
- BIN1 到引脚 7
- AOUT 1 至左电机 RED
- AOUT 2 至左电机 黑色
- BOUT 2 到右电机黑色
- BOUT 1 至右侧电机 RED
和往常一样,将电源线放在各自的位置。我建议将每个电源引脚断开到面包板条上。将 Nano 放入盒子中(如果不这样做,则无法连接它)。
将第一个电池的红色插入 Nano 的 VIN,然后当你准备好滚动时,将电池的黑色插入 GND。
第 6 步:编码
在 GitHub下载 Arduino 的代码。将其上传到您的 Nano。
在启动时在 Raspi Zero 上运行 .py 文件,如下所示:
在终端中运行此命令:
sudo nano /etc/rc.local
在 exit0 行之前添加此行:
python3 /home/pi/Desktop/(Ra)Spy-Bot Cam.py &
按 ctrl + x,然后按 y,然后输入。
而已!
对于流式传输,做同样的事情,但在 exit0 行之前添加此行:
python3 /home/pi/Desktop/(Ra)Spy-Bot Stream.py &
注意:将文件名和路径更改为适合您的文件名和路径,例如:
python3 /home/pi/Documents/your_file_name &
第 7 步:相机安装
在前面钻一个足够大的孔来安装相机,然后将带有适配器电缆的相机插入 Raspi Zero 的连接器。
将相机穿过孔,然后粘上边缘。把你的零放在机箱外壳中。将 USB 转电池转换器放入您的盒子中,准备好后,插入并观看记录!
第8步:完成!
确保外壳中没有短路。打开它。如果成功了,恭喜!!!你做到了!
做一个测试任务来庆祝,然后休息一下,观看你的 1 1/2 分钟节目或直播!
感谢您观看我的项目!
直到下一次,
来自 g3holliday 的快乐制作
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




