
资料下载


迷你自主机器人开源分享
479809
分享资料个
描述
介绍
我们的项目是在 kilobot 的基础上制作一个机器人,并添加一个自主充电系统和一个更好的定位系统。该程序是工业项目的一部分,索邦理工大学作为工业部门,智能系统和机器人研究所 (ISIR) 作为客户。
该团队由 Polytech Sorbonne 的五名学生组成:
- 罗曼博博特
- 瑞安·达内卡斯
- 马修·古里雄
- 克里斯蒂安·哈格(项目经理)
- 瓦伦丁雷纳尔
千洛机器人
kilobot 是哈佛大学开发的一种移动设备。它是一个微型设备(直径 33 毫米,高度 34 毫米),专为群体工作而设计。事实上,这些机器人是要成群结队地运作的,多达一千个单位。它们主要用于实验室目的以进行研究。
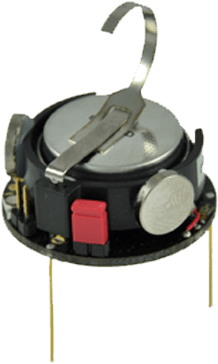
了解 kilobots
为了创建一个可以与实际的 kilobots 完全兼容的新机器人,我们首先需要了解它们的工作原理。我们将研究分为两个主要部分:硬件一(电子原理图)和软件一(代码)。
另一个重点是用于控制机器人的顶置控制器(OHC)。这就是使这个项目非常有趣的原因。事实上,OHC 允许您通过红外线 (IR) 控制您的机器人,而无需将它们连接到您的计算机。您甚至可以直接通过它上传您的代码。
硬件
首先,让我们来看看硬件部分。kilobots 原理图可分为五个主要部分:
- 控制所有组件的微控制器(atmega328p)
- 发射器部分,由晶体管控制的 IR 发射 LED 组成。它允许 kilobot 发送消息
- 收据部分,由红外线接收器组成。它允许 kilobot 接收消息。接收到的信号在被微控制器分析之前通过运算放大器进行过滤和放大
- 允许 kilobot 移动的两个振动电机。
- 充当人机界面 (HMI) 角色的 RGB LED
软件
要对您的 kilobot 进行编码,您可以使用一个非常用户友好的界面,它看起来很像 arduino 界面。有一个设置和一个循环功能。名为“kilolib”的库为您提供了许多简单的功能来设置 RGB LED 的颜色、发送或接收消息、让机器人移动……
kilobot 在不同的状态下工作,最重要的是:
- 运行状态:执行您编写的代码
- 暂停状态:什么都不做
- 睡眠状态:睡眠
- 电压状态:表示电池电量
- 上传状态:上传新代码
这是 kilobot 最起码的功能。我们现在的工作是创造一个新的机器人,它具有相同的行为,能够与 kilobots 通信,但它也将具有以下新功能:
- 添加定位系统。事实上,目前 kilobot 只有一个接收器。即使它可以估计发送消息的其他机器人的距离,它也无法知道那个机器人在哪里。所以我们需要找到一种方法,这样我们就能或多或少地知道我们正在说话的机器人在哪里。
- 打造自主充电系统。目前,当 kilobot 需要加油时,必须用手将其放在充电站上。这真的很烦人,尤其是当你有数百个机器人时。因此,我们的目标是创建一个“自主充电系统”,使千叶机器人无需操纵即可加油。
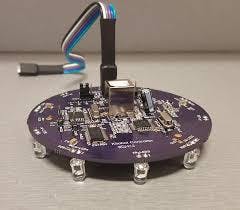
新定位系统
新的定位系统有 3 个红外线接收器,因此他可以检测来自 6 个不同方向的信息。此功能使我们能够在每个 kilobot 收到的消息中获得一个附加信息,即方向。因此,当这个新的 kilobot 收到一条消息时,它会为用户提供三个有用的信息:
- Message :接收到的4字节数据内容。
- 距离:两个通信千头机器人之间的距离。
- Position : 发送 kilobot 的相对方向,精度为 60°。
该代码位于:https ://github.com/kristianharge/projetIndustriel
原理图附在这篇文章中。
自主充电系统
自主充电系统由一面墙组成,它会发出特定信息,因此 kilobot 会将墙识别为充电站。然后,如果电压低,kilobot 将在竞技场中搜索充电站,一旦找到,它就会尝试靠近,直到检测到它正在充电。
结论
这个项目真的很充实,我们了解了很多对我们所有人来说都是全新的不同技术。除了庞大的技术学徒期外,我们还在管理和团队合作技能方面下了很多功夫。ISIR 研究实验室正在继续这项工作,他们希望大约在两年内完成。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




