
资料下载


ACR自主清洁机器人开源分享
笑尽往事
分享资料个
描述
灵感
在covid-19大流行期间,我们学会了自己做家务的方法。不仅如此,大流行后的情况将更有价值,需要继续保持我们内心养成的那些习惯。在我们的日常生活中,包括:
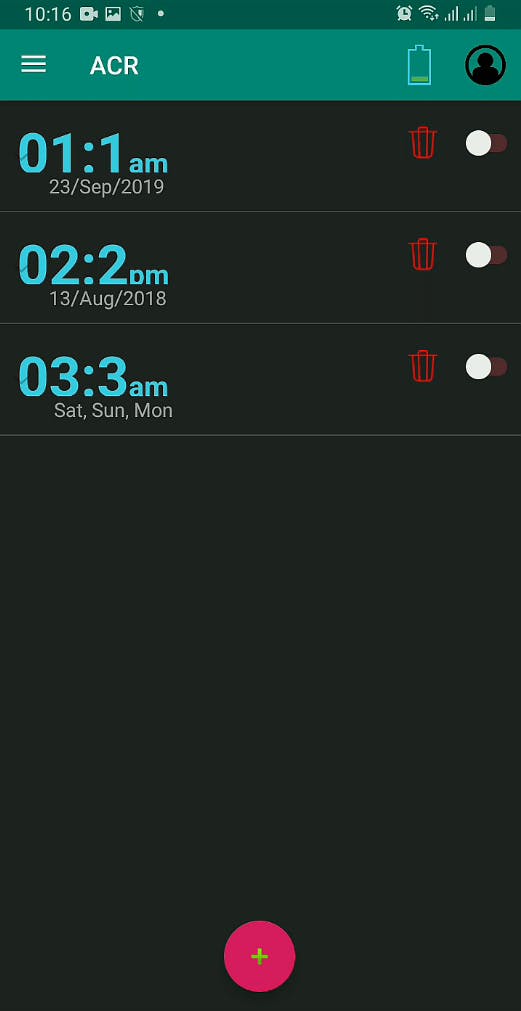
- 设置闹钟以便及时起床或吃药。
- 进行清理(从地板上吸尘/拖地)。
- 是时候离开办公室了!(你忘了关灯或风扇)。
- 长时间不在家时,需要使用一些监控设备持续监控室内活动。
因此,我们的目标是建造一个可以帮助我们完成所有这些任务的机器人。这样,生活会更愉快,也需要更少的努力。
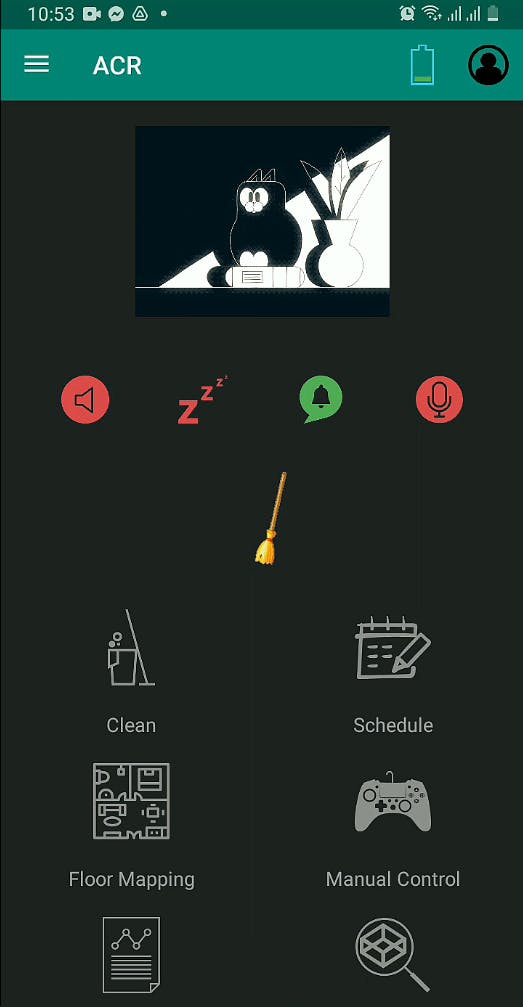
什么是 ACR
它能做什么
机器人
- 能记得起床的时间,
- 用哔声提醒你吃药,
- 帮助清洁,
- 可作为儿童遥控玩具,
- 当感应到低电量时,它可以自动返回充电座,
- 当我们不在家时,它还可以监控室内活动。为了便于访问,所有这些都必须通过 android 应用程序远程访问。此外,应用程序将是安全的,因此每次用户想要访问时,它都可以验证他的身份验证。

我们是如何建造的
软件部分:
对于软件部分,该应用程序是在以下 GitHub 存储库上构建并制作为免费软件的。URL:GitHub_Repo_ACR 。全部工作尚未完成,修改仍在进行中。Demo of the software:
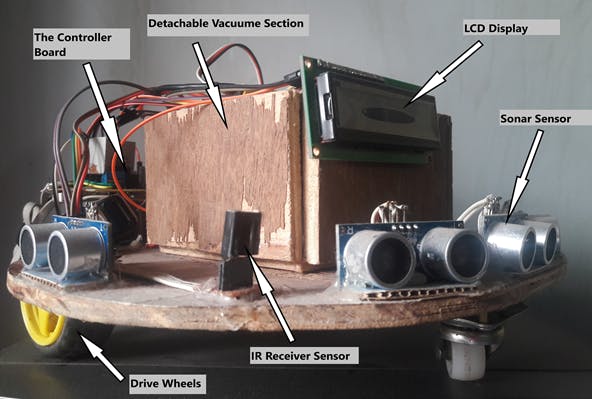
硬件部分:
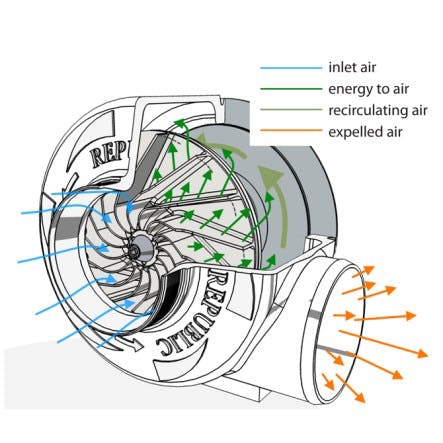
真空清洁部分:要进行真空清洁,我们将遵循吹叶机如何从一个腔室中吸入空气并将空气吹向其排气口的主要方法。
主要设计:我用一些主要部件制作它,比如纸板箱、螺旋桨、一些木头和电线,将它们固定在一起。虽然我用过11kv无刷电机,但没必要跟着我的功率测量。根据您的需要选择电机和电调。

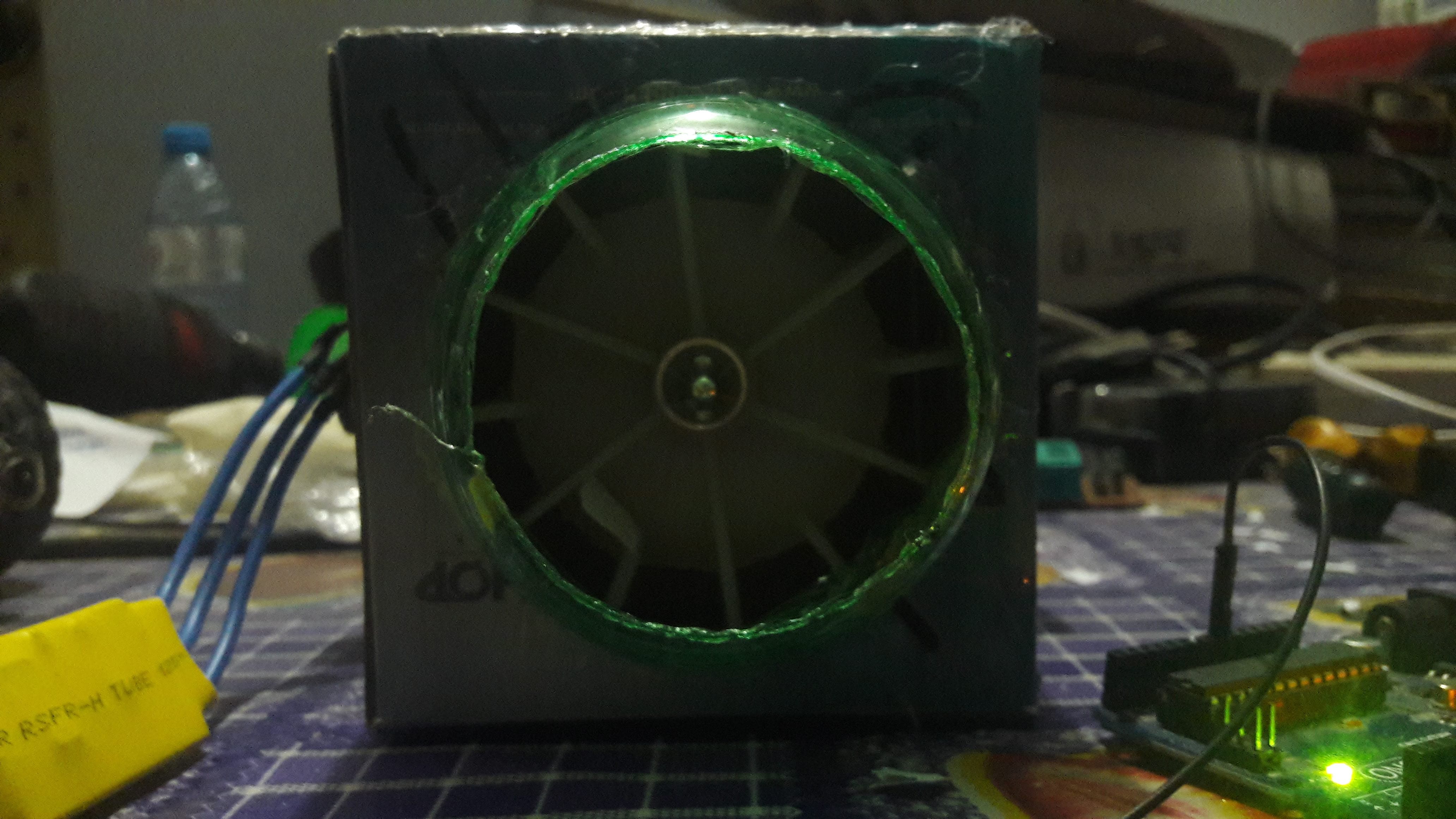
它是如何执行的:
仔细看。看?它吸尘纸片。它真的有效是不是很棒!虽然有一些设计缺陷,但看到原型工作还是很令人满意的。
抽吸机构总装:
我们不能用纸和一些金属丝来做我们的抽吸机构,所以有必要做一个坚固的工作。我为这项工作选择了胶合板,因为它使原型重量轻且非常耐用。最终的组装结果是这样的。

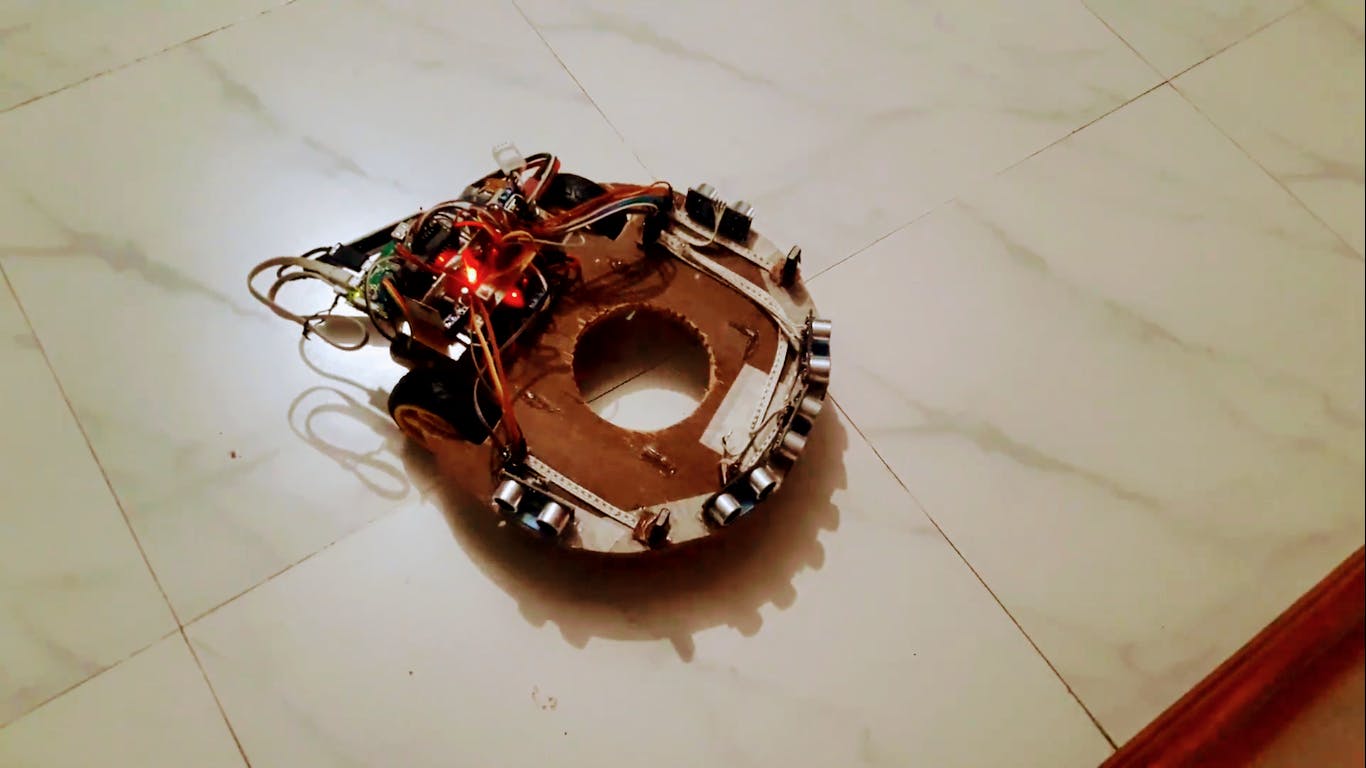
底盘设计:
使用 AutoCAD 设计软件进行测量和调整制造过程。根据您的要求的设计参数进行调整。
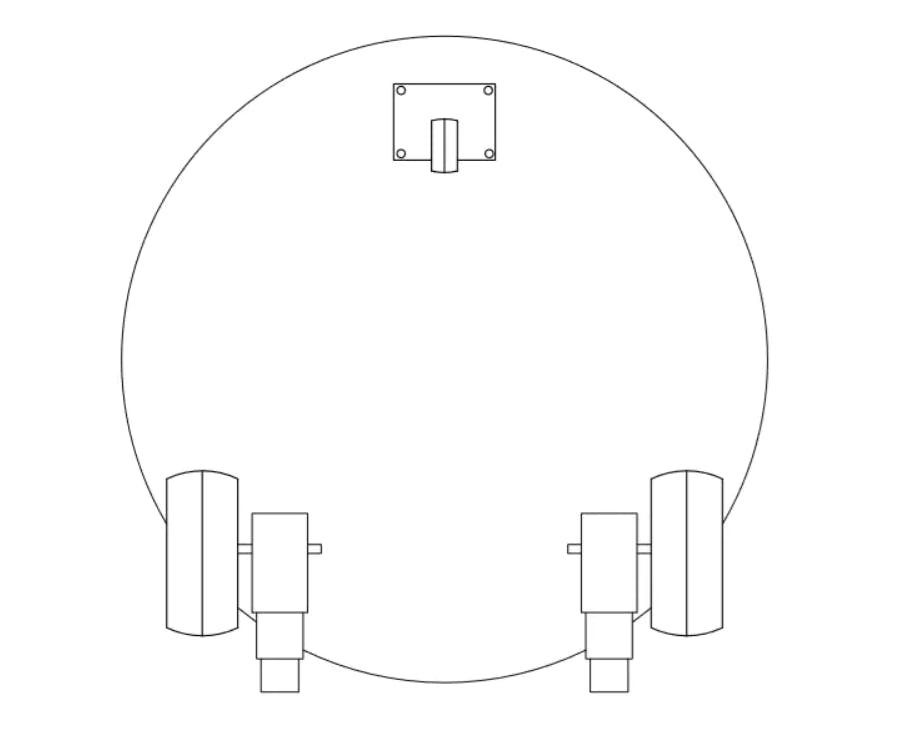
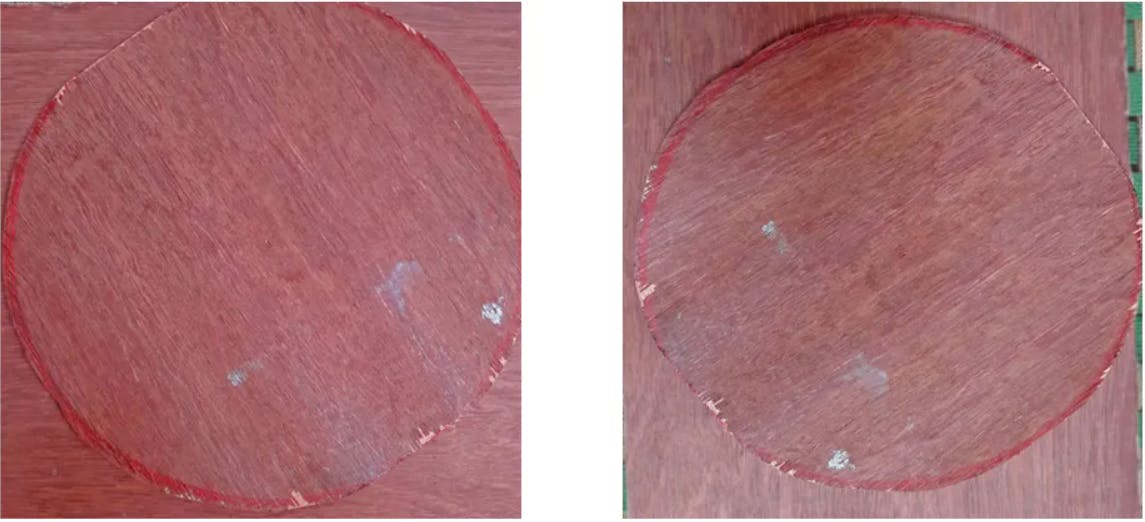
底盘制造:
机箱由胶合板制成,在大多数五金店都很容易买到。如果它的建造方式可以穿越所有区域并且所有设备都可以轻松安装。为此,优选的形状应该是圆形/椭圆形。机箱圆形半径为 5 英寸。
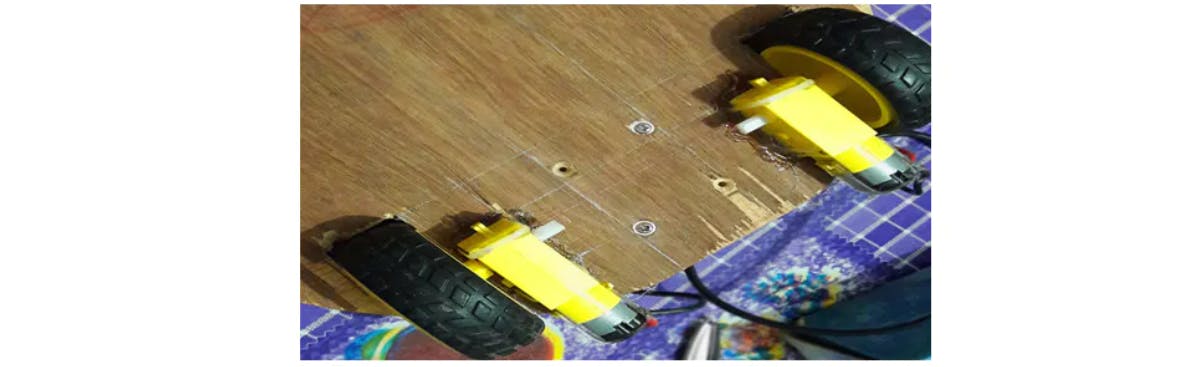
驱动电机和车轮安装:
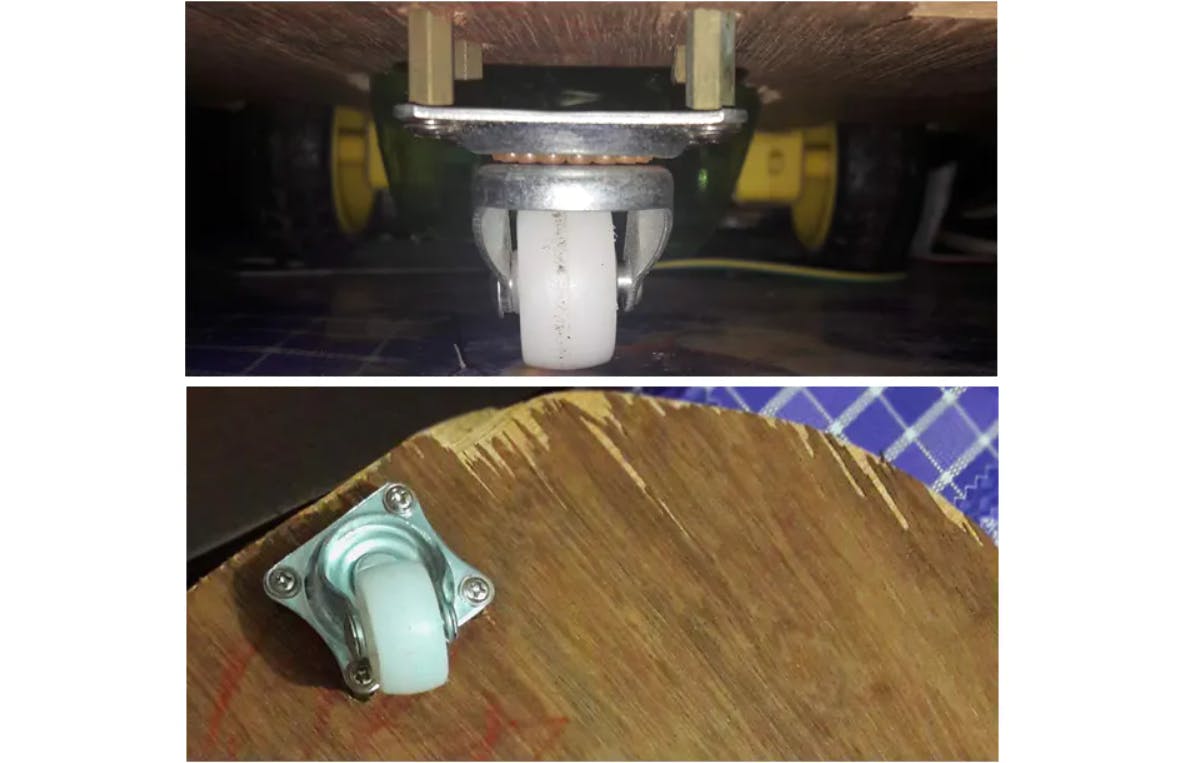
脚轮安装:
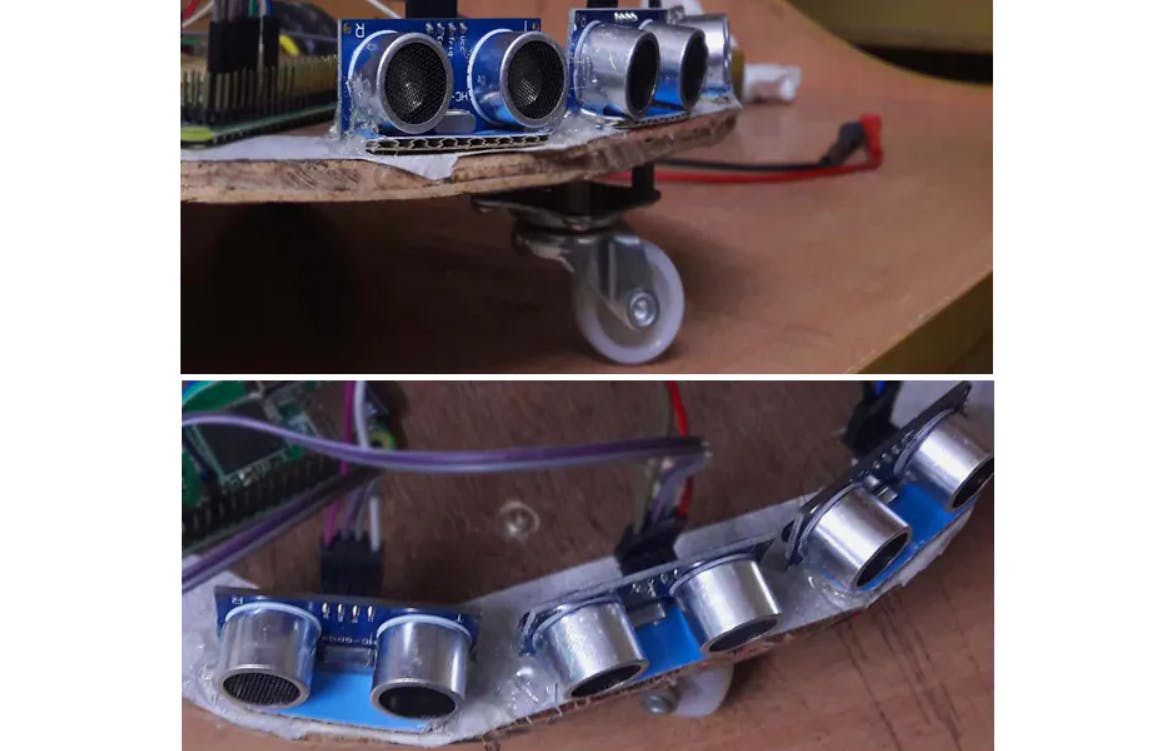
在底盘上安装声纳传感器:
使用胶枪将声纳传感器安装在底盘主体上,并使用纸板纸使它们升高和平衡。
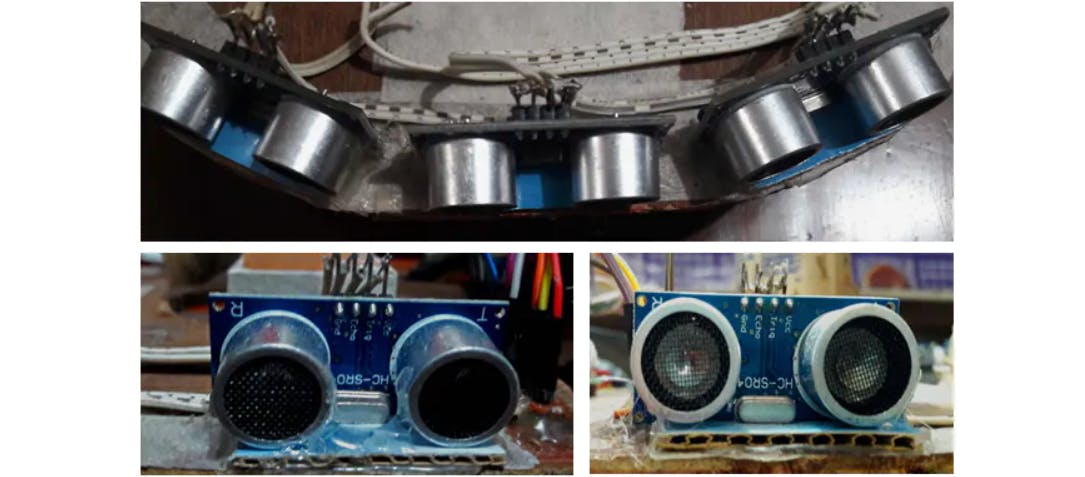
最终声纳组装和焊接:
在机箱上安装红外接收器:
使用焊接在 Vero 板上的母头针连接 IR 接收器并将其热粘在机箱上,连接的白线用作 VCC、gnd 和 Signal。

IR 信标外壳组件:
IR 信标/发射器电路是从有一些按钮故障的旧电视遥控器中提取的。为了让信标始终工作,不得不短按一个按钮。信标产生 38KHz 的频率,机器人试图遵循该路径。

最终电路组装:
电路图可以在fritzing文件中找到。
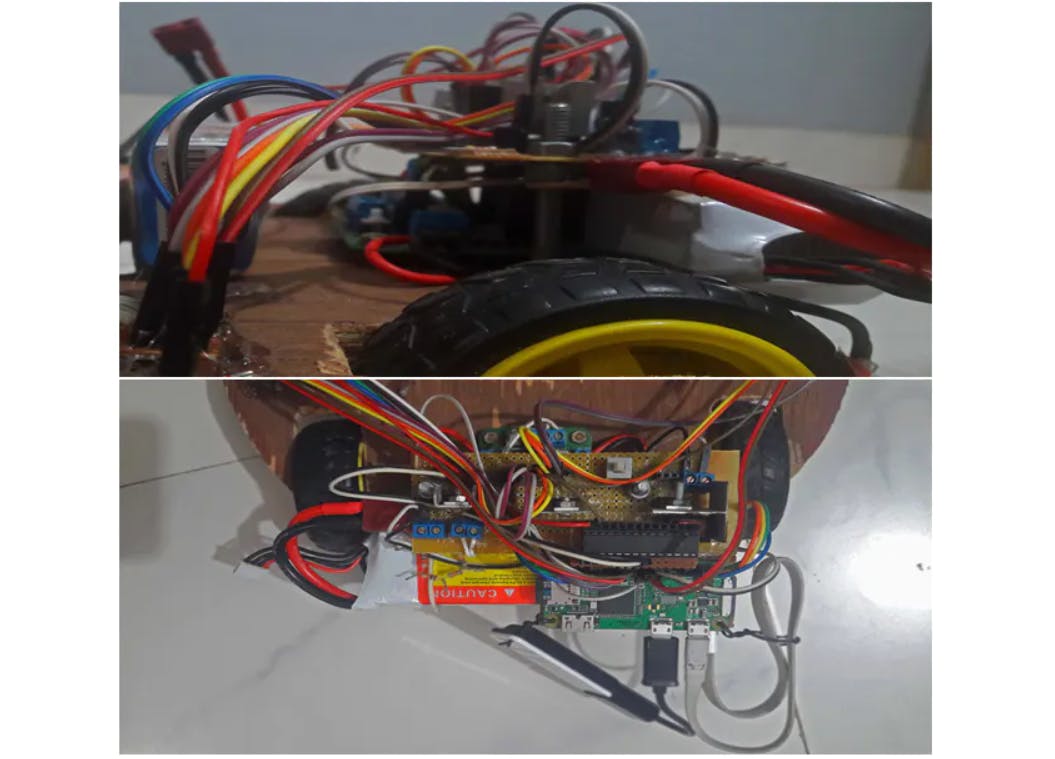
一些说明:
- 我使用了模拟传感器,例如 IR 接收器,用于读取使用 ATMega328p 的传感器值。
- ATMega328p 提取传感器数据,执行 Arduino 代码并生成电机控制字符串,例如:向前、向左、向右,使用串行端口(从微控制器读取 tx 引脚)发送到树莓派。
- 树莓派和 Arduino 之间的串行通信设置程序,可以在这里找到。
- 我们使用外部 wifi 适配器以获得更好的连接性。外部适配器不是强制性的,也可以使用内置适配器。
** 这个项目很长,因为它有很多机械部件。我使用了以前为我的另一个项目制造的底盘,所以我很容易重新制造它。不用担心!我已经尽可能完美地描述了整个过程。希望能帮助到你。:)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




