
资料下载


×
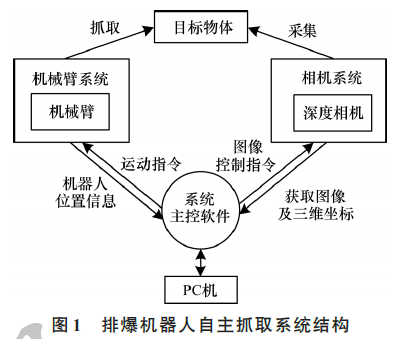
一种基于深度相机的排爆机器人自主抓取系统
消耗积分:0 |
格式:pdf |
大小:2.41 MB |
2021-03-12
分享资料个
在传统基于固定视觉的排爆机器人抓取系统中,相杋视觉易被遮挡且不能保证拍摄清晰度。基于随动视觉技术,提岀一种将深度相机置于机械手末端并随杋械手运动的排爆杋器人自主抓取系统。利用深度相机计算目标物体的三维坐标,采用坐标转换方法将目标物体的位置坐标信息实时转换至机器人全局坐标系,并研究相机坐标系、机器人全局坐标系与末端执行器手爪工具坐标系三者的动态映射关系,实现排爆机器人的自主抓取。实验结果表明,与传统固定视觉方法相比,随动视觉方法可在误差2cm内,使得机器人机械手爪准确到达目标物体所在位置,且当机器人距离目标物体100cm~150cm时,抓取效果最佳。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




