
资料下载


Arduino Nano 33 BLE OV7670相机扩展板
分享资料个
描述
对于低功耗嵌入式系统,Arduino Nano 33 BLE 处理能力中等偏高。由于它板载了许多传感器,因此运行 TinyML 之类的软件似乎非常有趣。
我认为连接视觉会更有趣,所以我创建了一个连接低成本相机 OV7670(约 3 美元)的电路板。
此外,还安装了必要的电源控制、用于卸载伺服处理的PWM控制器IC、扬声器、IR接收器等。

安排了 OV7670 连接,以便可以使用库 (https://github.com/arduino-libraries/Arduino_OV767X) 。相机由 Arduino Nano 33 BLE 的 3.3V 供电。
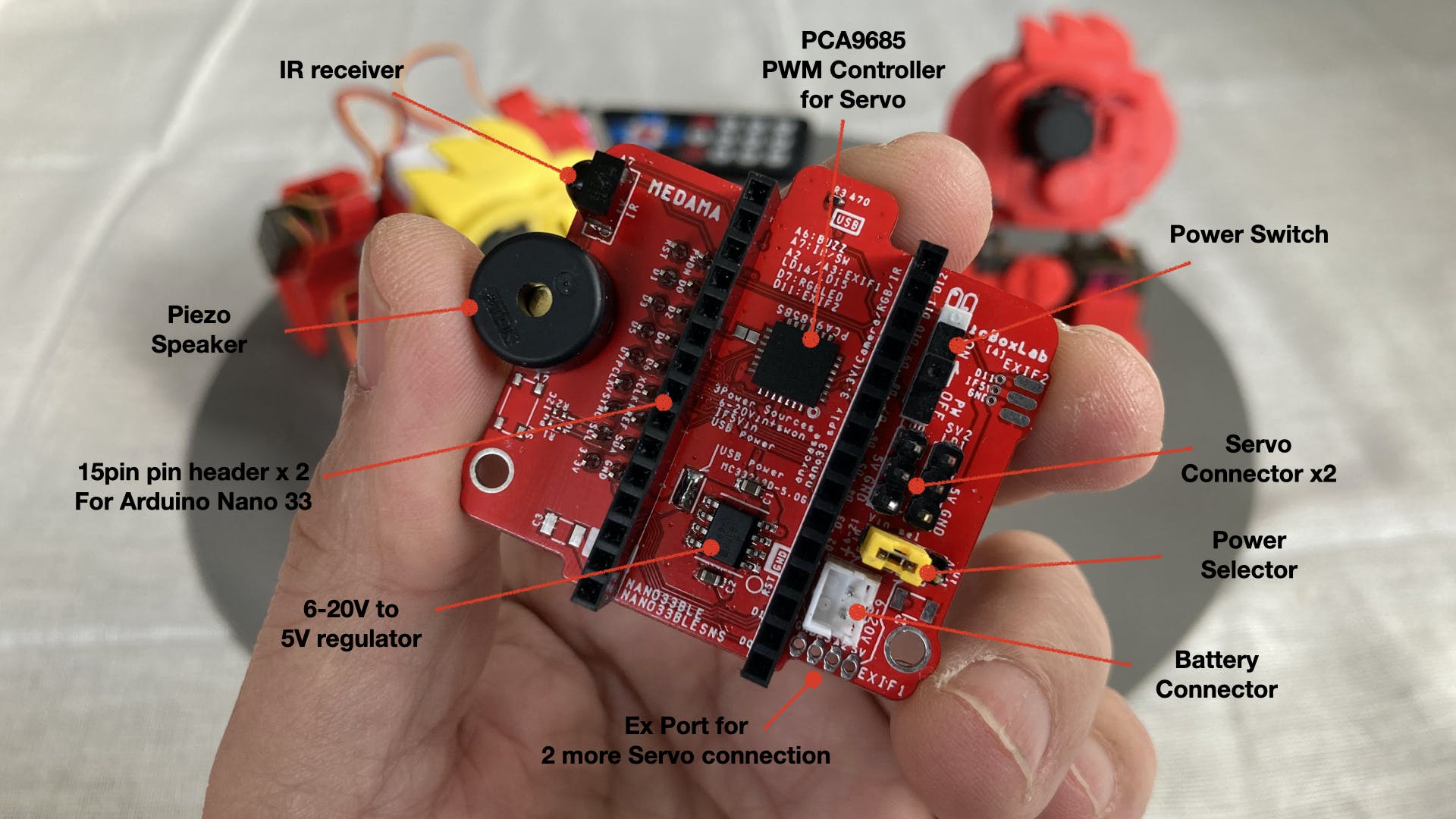
在执行相机库和ML处理时控制伺服信号有点繁重,所以我通过I2C接口连接PCA9685 PWM控制器进行伺服控制。该IC一直保持伺服控制信号。
与传统的 nano 不同,Nano 33 只能通过 USB 电源提供 5V,所以我放置了一个电压调节器,可以从电池产生 5V。电池应该是可充电的9V,但可以连接任何6-20V的电池。
如果您更改电源选择跳线,也可以从外部系统提供 5V。在这种情况下,5V 将直接提供给 Nano 33 和伺服系统。
此外,还添加了 NeoPixel(彩色 RGB LED)、压电扬声器和 IR 接收器,以丰富表达或增加程序开发的效率。
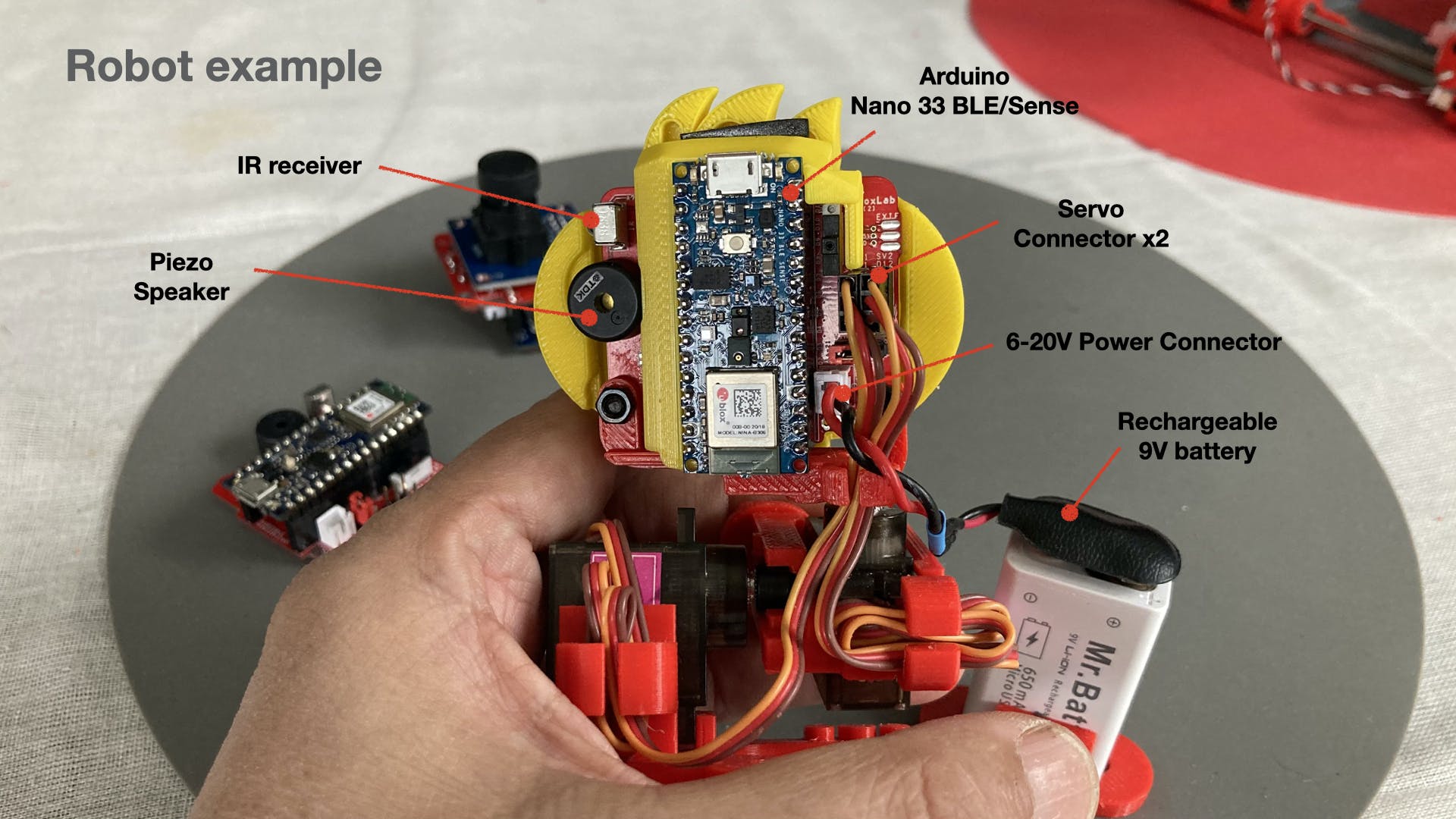
在接下来的报告中,我想介绍使用该板的小型桌面机器人和四足机器人的示例。
印刷电路板是通过将 Gerber 数据发送到 jlcpcb.com 制成的。
文章“使用低成本相机模块的机器视觉”对这个设计很有帮助。非常感谢。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





