
资料下载


通过Arduino Uno和继电器做一个蓝牙控制灭火器车
好名字
分享资料个
描述
大家好,我的名字是 Harji Nagi。我目前是坎普尔 (UP) 的 Pranveer Singh 理工学院电子和通信工程专业的二年级学生。我对机器人、arduino、人工智能和模拟电子学有着浓厚的兴趣。
1)本项目概述:-
今天我通过Arduino Uno、电机驱动护罩、HC-05蓝牙模块和继电器模块做了一个蓝牙控制“灭火器车”。我用自己对Arduino的经验和知识做了这个。这辆车可以通过蓝牙用你的手机控制模块。可以灭火。还有控制水管方向的手臂。它可以360度旋转。
所需组件如下:
1)电机驱动器屏蔽
电机护罩有 2 个通道,可以控制两个直流电机或 1 个步进电机。通过寻址这些引脚,您可以选择要启动的电机通道、指定电机方向(极性)、设置电机速度 (PWM)、停止和启动电机,并监控每个通道的电流吸收。
更多详情:点击这里
2)阿杜诺乌诺
Arduino 是一个基于易于使用的硬件和软件的开源电子平台。Arduino 板能够读取输入 - 传感器上的光、按钮上的手指或 Twitter 消息 - 并将其转换为输出 - 激活电机、打开 LED 等。有关更多详细信息:单击此处

3)继电器模块

继电器模块是一个单独的硬件设备,用于远程设备切换。有了它,您可以通过网络或 Internet 远程控制设备。更多详情:点击这里
4)汽车底盘(4*BO电机)

您可以使用纸板制作自己的底盘
5) 一个 3.3-5 V 潜水水泵,带 30cm 管
6)10 RPM 直流金属齿轮马达
HC-05蓝牙模块是一个易于使用的蓝牙SPP(串行端口协议)模块,专为透明的无线串行连接设置而设计。... HC-05蓝牙模块提供主从模式之间的切换模式,这意味着它可以使用既不接收也不发送数据。
更多详情请点击:点击这里
8) 跳线
9) 8V、1.5 安培电池,用于为 Arduino Uno 和电机驱动器屏蔽供电
10)4V, 1 安培潜水泵电池,或者您可以使用 7805 稳压器 Ic
LM7805 是一款输出 +5 伏电压的稳压器。与市场上大多数其他稳压器一样,它是一个三引脚 IC;输入引脚用于接受输入直流电压,接地引脚用于为稳压器建立接地,输出引脚提供正 5 伏电压
更多详情请点击:点击这里
其他设备:
1)烙铁
2)胶枪
3)钻孔机
我没有使用面包板,而是使用了一个小型穿孔板进行正负总线连接。
2) 连接图:-
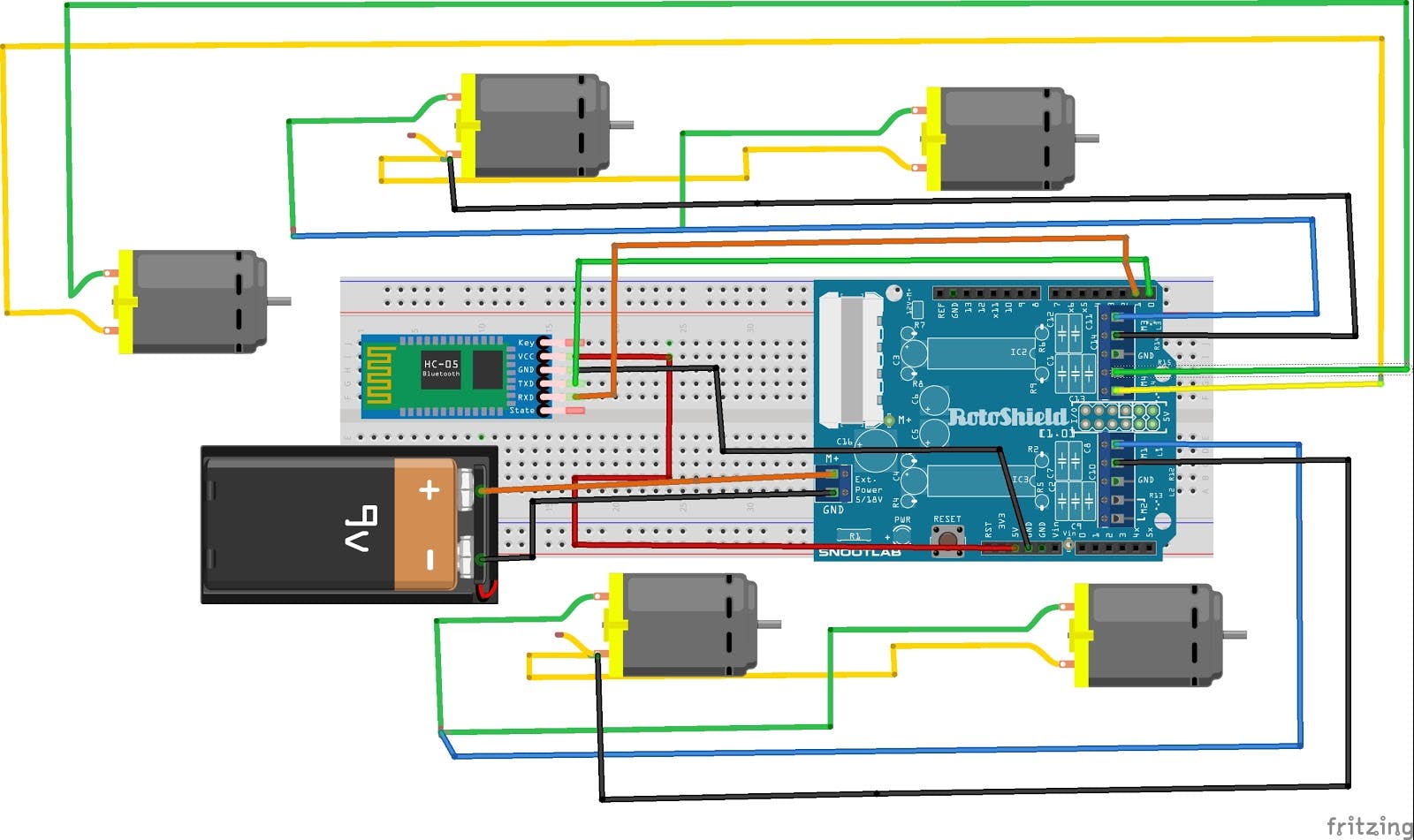
将 2 根电线焊接到 BO 电机。接下来,将电线的另一端连接到电机驱动器护罩上的 2 孔插座。连接电线的顺序无关紧要。对另一个电机重复此操作。
按照电路图进行连接。
取 8v、1.5Ampere 电池组并连接到电机驱动器屏蔽的 M+ 和接地引脚。这将用于稍后与 arduino 实现公共接地。
3)潜水泵与继电器的连接:-
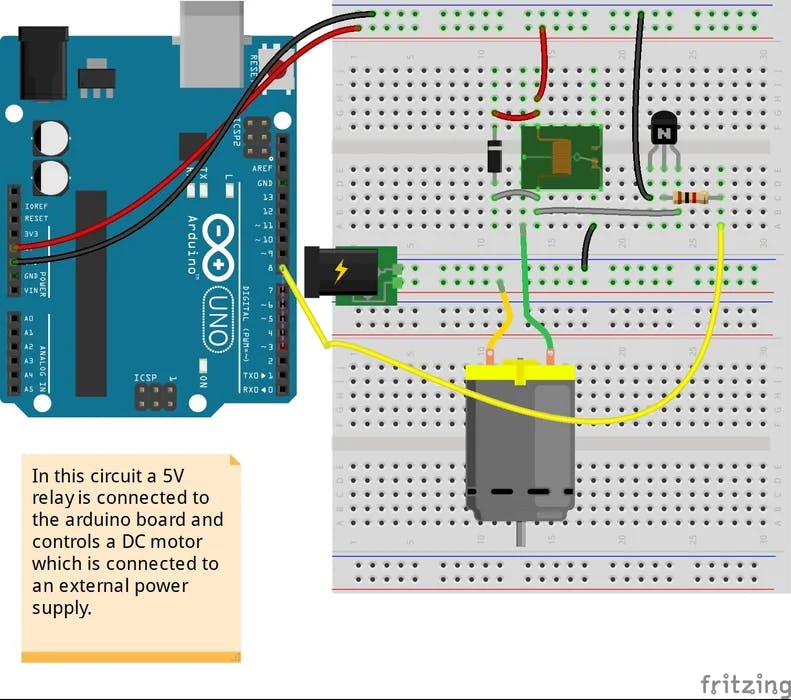
您可以使用继电器模块,也可以构建自己的自定义继电器模块。如果您使用继电器模块,则连接 NC 和公共点。作为电源您可以使用 7805 稳压器 IC 将 8V dc 转换为 5V dc 或您可以使用4V,1安培电池的外部电源。但记住不要使用超过6v的电源,它会损坏5v潜水泵。
如需更多水压,市场上也有 12V 潜水泵,但您必须根据它更改电路连接和电源。
按照说明按照电路图进行操作。
4)编码: -
您必须包括以下库:
1)
2)
下载 zip 文件后,在 arduino sketch 中添加 zip 库
在上传代码之前,您必须移除 HC-05 蓝牙模块的 Tx 和 Rx 引脚,因为它会损坏 HC-05 的 IC。
上传代码后,将 Hc-05 的 Tx 和 Rx 引脚重新插入到电机驱动器屏蔽层。
5)应用程序配置:
在安装应用程序时,将其与 Hc-05 配对并输入密码,如 0000 或 1234。配对后根据代码配置按钮。
概括
我们将需要 4 个用于汽车的电机,一个用于控制管道方向的电机和一个水泵。驱动电机的电机驱动护罩需要一个大脑(在我们的例子中是 arduino)来命令机器人如何移动。我们可以将手机用作遥控车的遥控器。但是,如果您想使用计算机,请配对您的计算机使用蓝牙模块,转到蓝牙配置页面末尾的蓝牙设置,检查它连接到哪个端口(提示:它是传出的并且具有您的蓝牙模块的名称)。转到工具 > 串行端口并将 COM 更改为正确的 COM 端口。启动串行监视器并输入“F”让机器人向前移动,“B”向后移动,“L”向左移动,“R”向右移动等。对于控制水泵,您可以在应用程序中使用开关. 并且为了调整水管的方向,你可以使用'X'和'Y'左右键。如果你已经走到这一步,恭喜你!玩得开心你的灭火器车。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





