
资料下载


户外漫游者开源项目
分享资料个
描述
Garden-Gnome-Robot 是一款户外漫游车。它利用航路点进行导航。GPS、IMU 和用于定位的卡尔曼滤波器。
成分
- 树莓派
- Arduino UNO
- IMU
- H桥
- 12v电池
- 2个电机
- GPS突破
- 2个超声波传感器
树莓派
树莓派是机器人的大脑。它计算机器人必须遵循的路径和所有其他复杂的逻辑。
Arduino UNO
Arduino UNO 是 IO 盾牌。它控制所有高压组件(电机)。它读取模拟传感器并将所有数据通过 I²C 传递到 Raspberry Pi。
IMU
IMU基于BNO055芯片,用于机器人的航向和相对定位。它通过 I²C 与 Raspberry Pi 进行通信。
H桥
H 桥控制 2 个电机。Arduino 将 Raspberry Pi 的命令传递给 H 桥。
12v锂离子电池
12 伏电池在最大负载下为机器人提供 4 小时的电力。
GPS突破
GPS 模块提供绝对位置。GPS遭受很多多路径。良好的定位需要速度。换句话说,静态对象的定位不好。
超声波传感器
超声波传感器安装在机器人的前部。它们在机器人前面提供物体检测。Arduino 读取输出并将其传递给 Raspberry Pi。
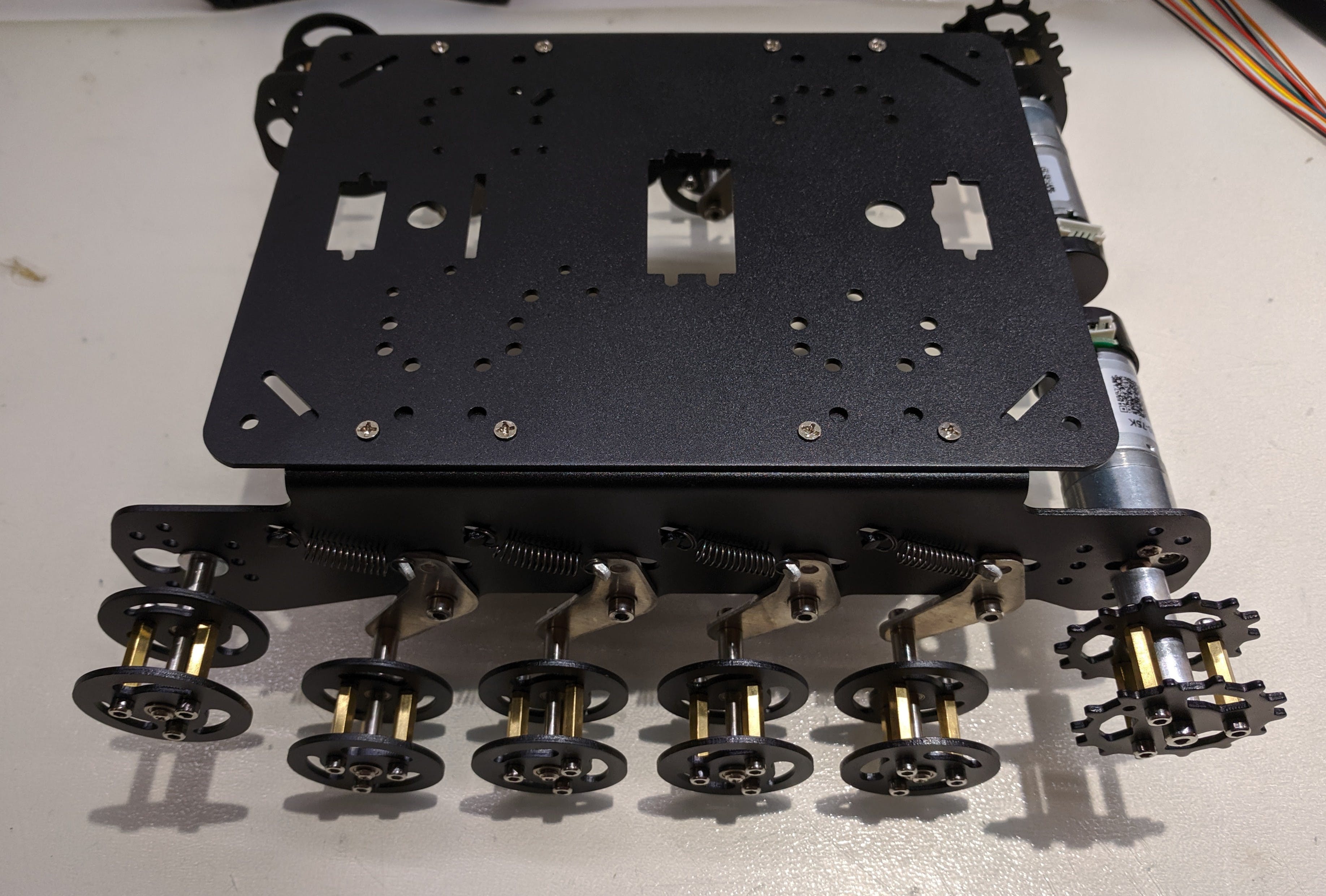
第 1 部分:底盘
该机器人基于 TS100 底盘。履带底盘可在不平坦的地形上提供更好的牵引力。

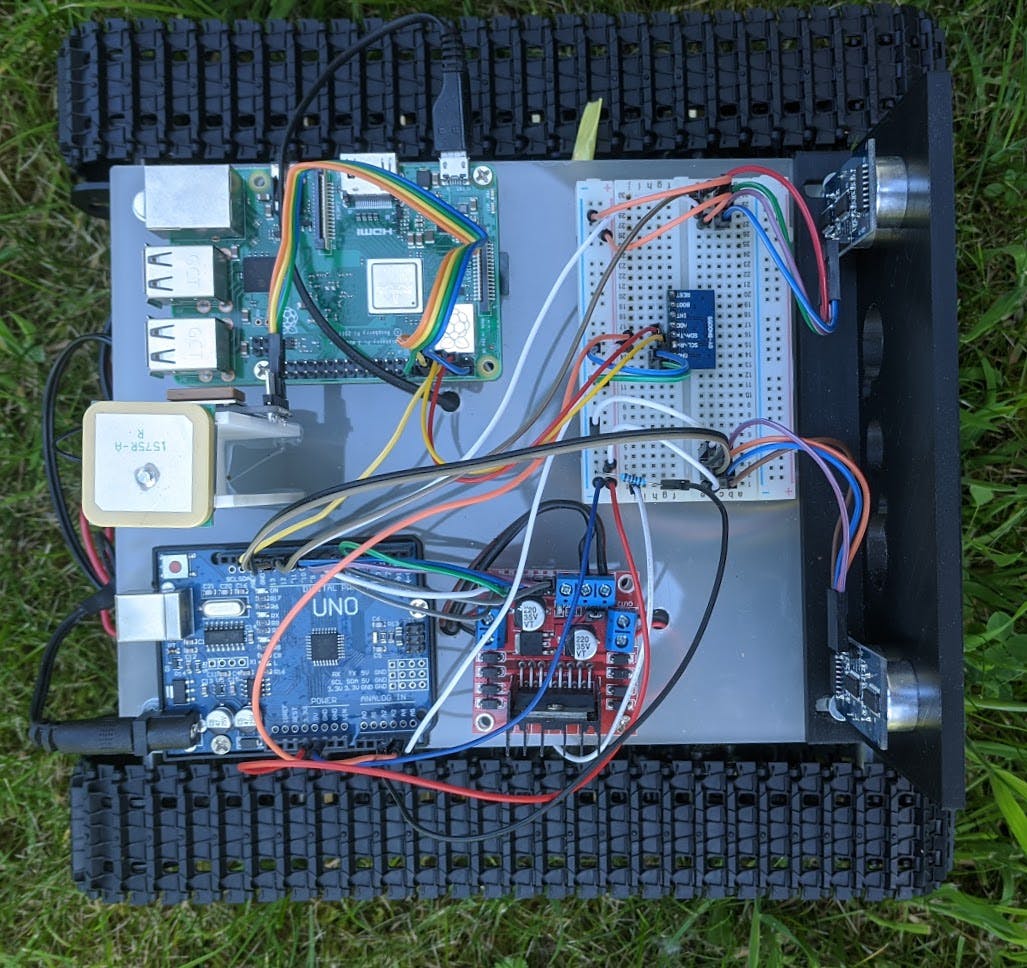
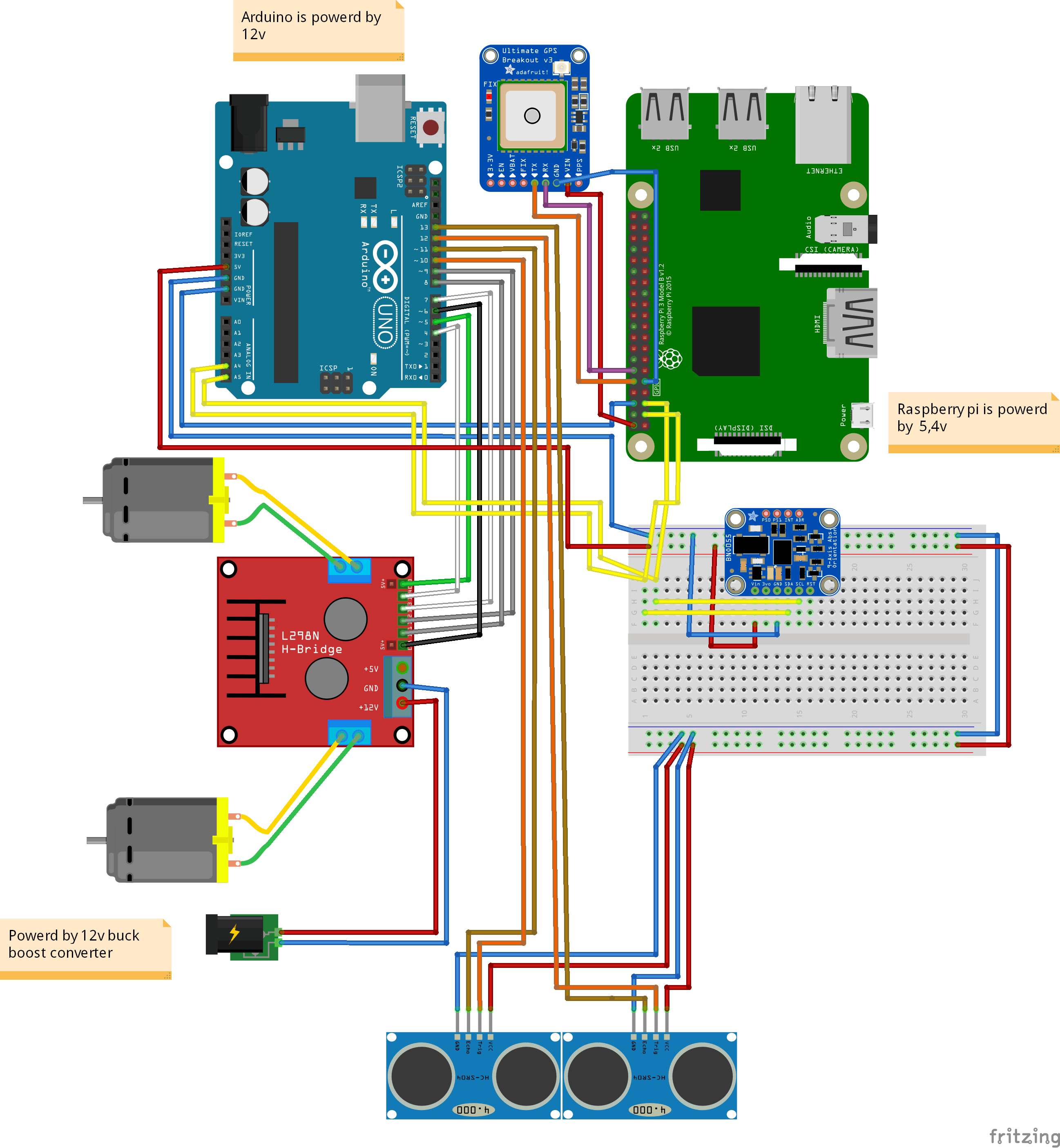
第 2 部分:电子产品
传感器、控制器和电机接线:
电源电路板:
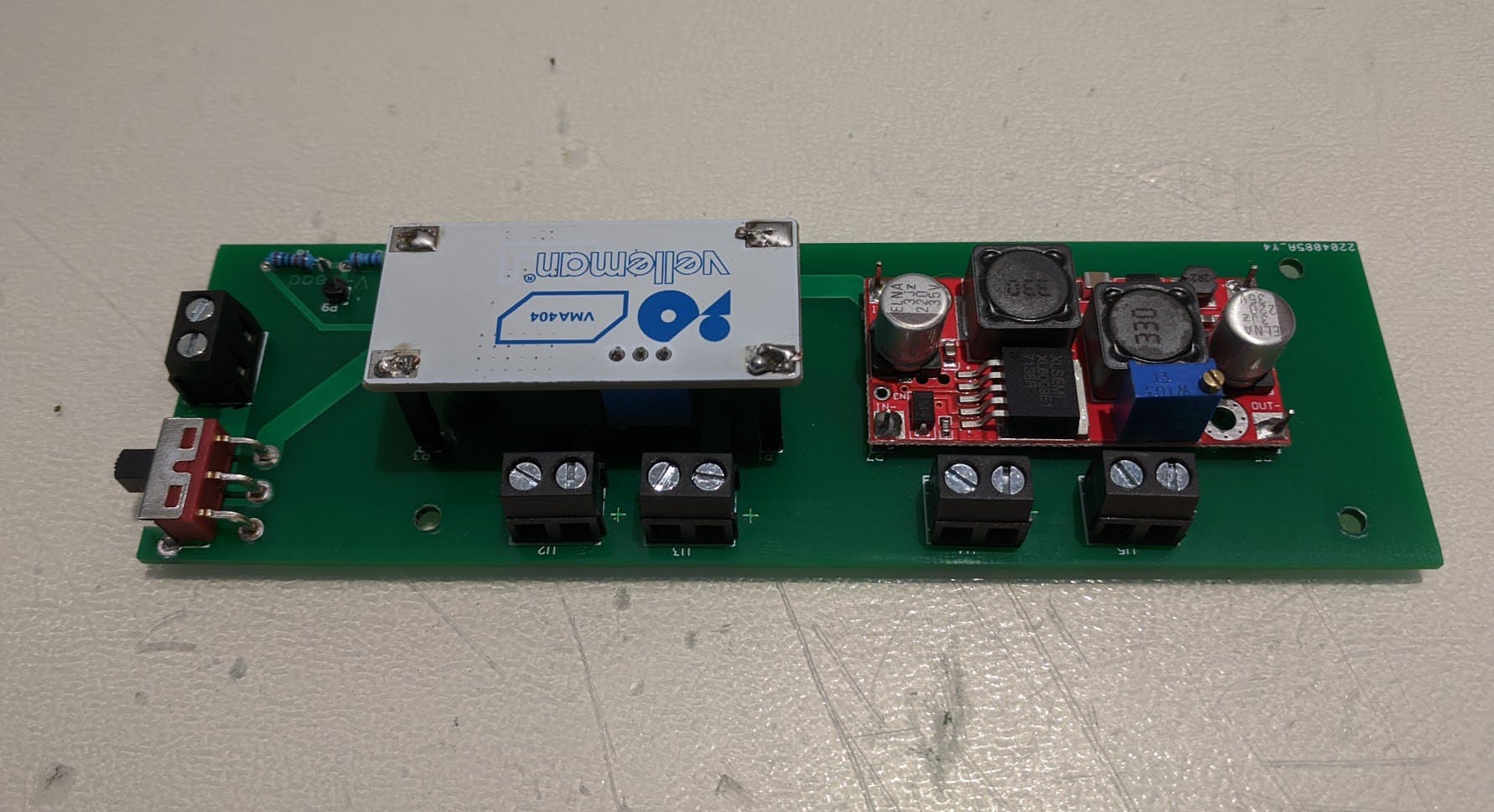
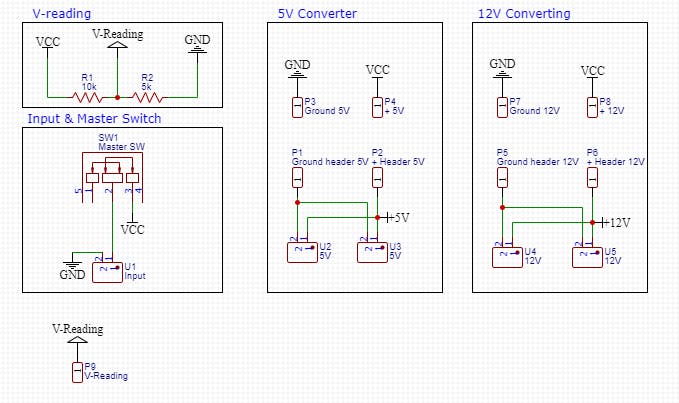
示意图:
第 3 部分:软件
树莓派上的软件是用 Python 编写的。
Arduino c 中的 Arduino 上的软件。
第 4 部分:卡尔曼滤波器
卡尔曼滤波器在IGNS.py中用于定位。我在这篇文章中解释了卡尔曼滤波器的内部工作原理。
图片
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





