
资料下载


紫外线消毒机器人
尤立虔
分享资料个
描述
概念
在大流行期间,消毒对于防止病毒传播非常重要。它直接或间接地影响了我们生活的方方面面。在医院、购物区等拥挤的区域,消毒非常困难。因此,在这种情况下,低成本和可持续的解决方案更容易被接受。
这种疾病是通过细菌和病毒等生物有机体传播的。众所周知的事实是,这些生物体在暴露于紫外线时会变得不活跃。特别是在这次大流行中,UV-C 射线是根除那些破坏性生物的非常有效的方法。但是这些射线落在人体上也是非常危险的。
这就是为什么机器人在这种情况下很重要。机器人用于人类可能面临暴露风险的许多应用中。机器人能够以非常精确、清晰和一致的方式执行日常任务,只需很少或无需人工协助。
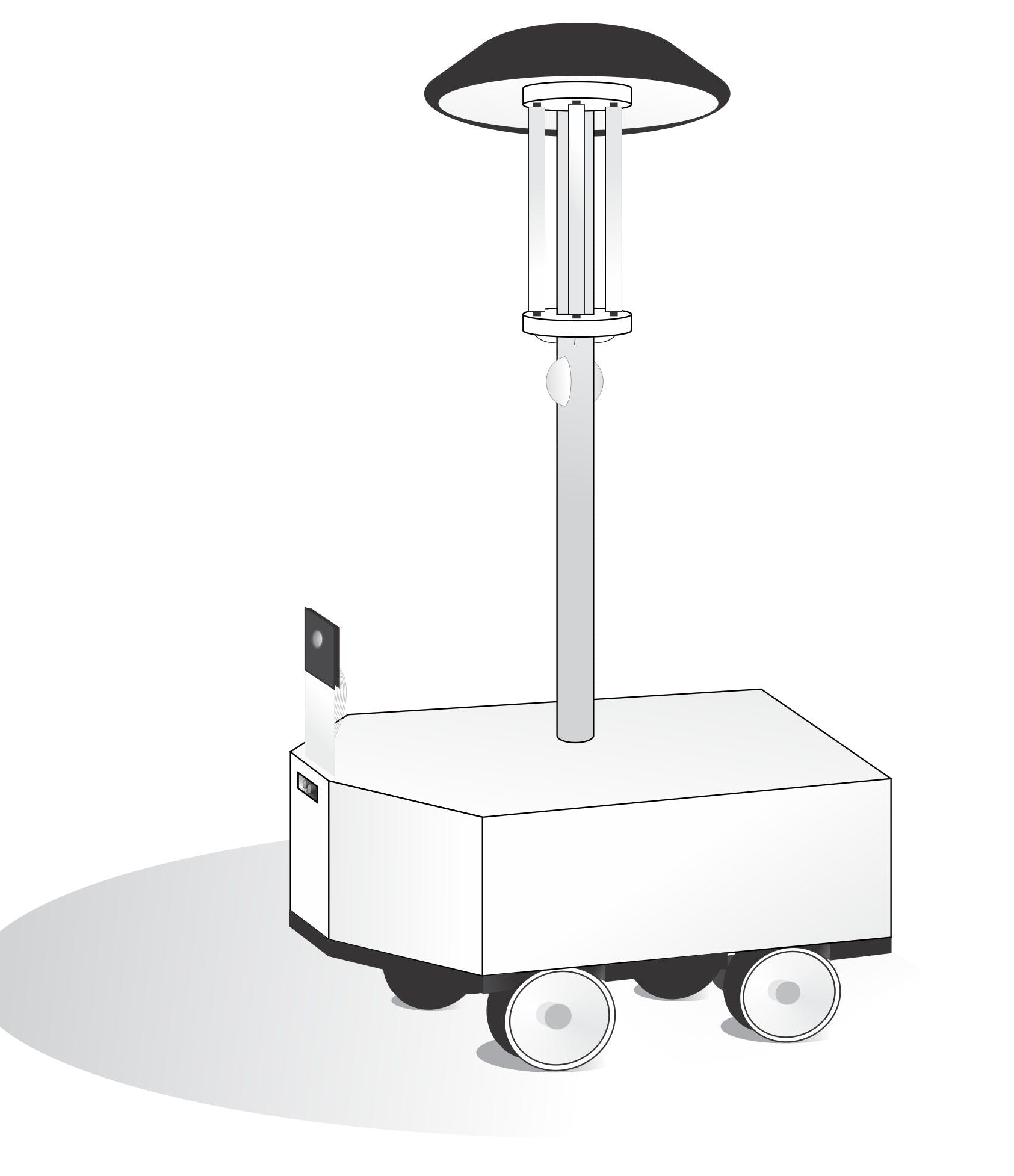
在这里,我们正在创建称为紫外线消毒机器人的机器人。这种遥控机器人还包含额外的安全功能,如避免碰撞和人体暴露。这个机器人长1.5米。
紫外线消毒机器人
这里是我们的设计。
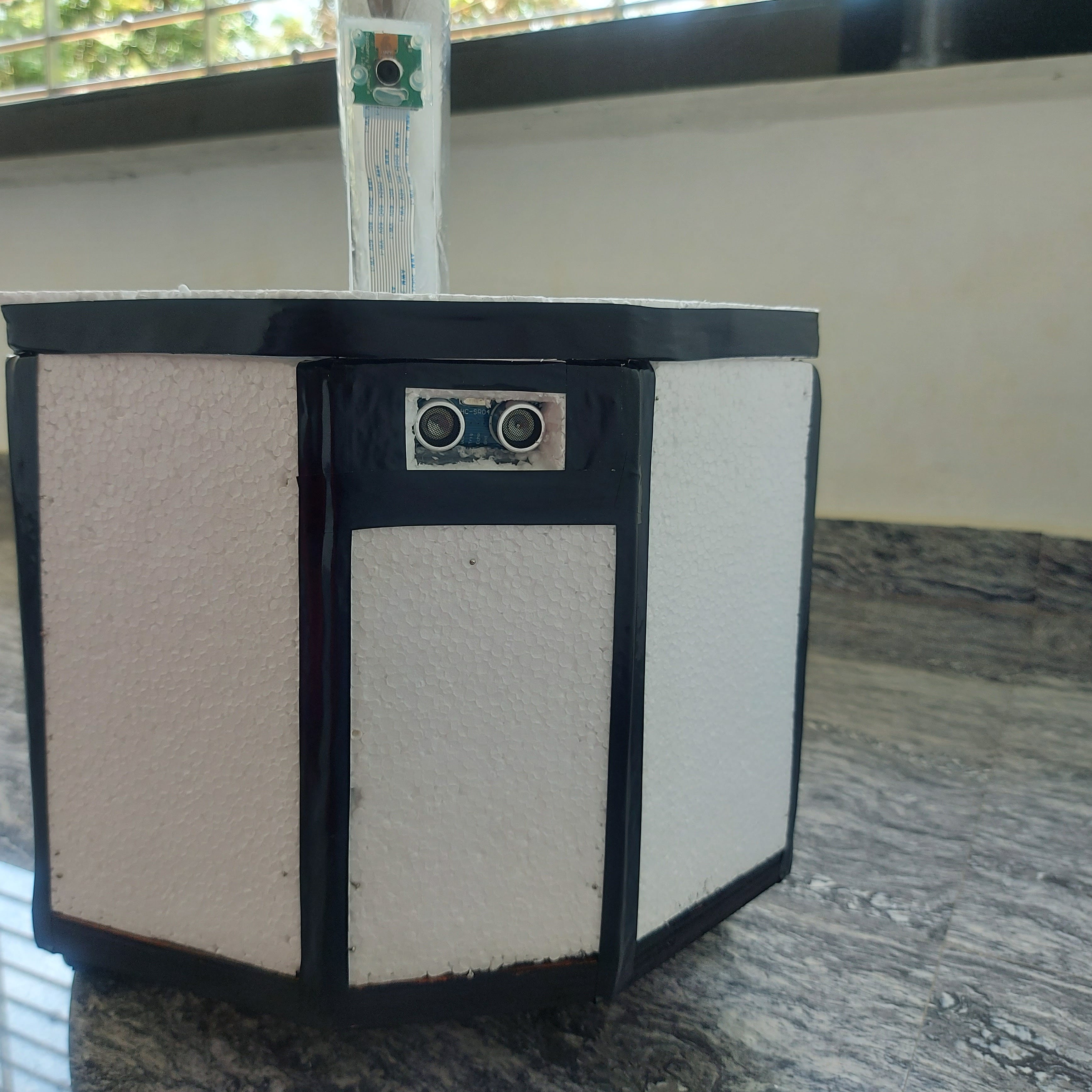
这里有一些关于机器人的照片。


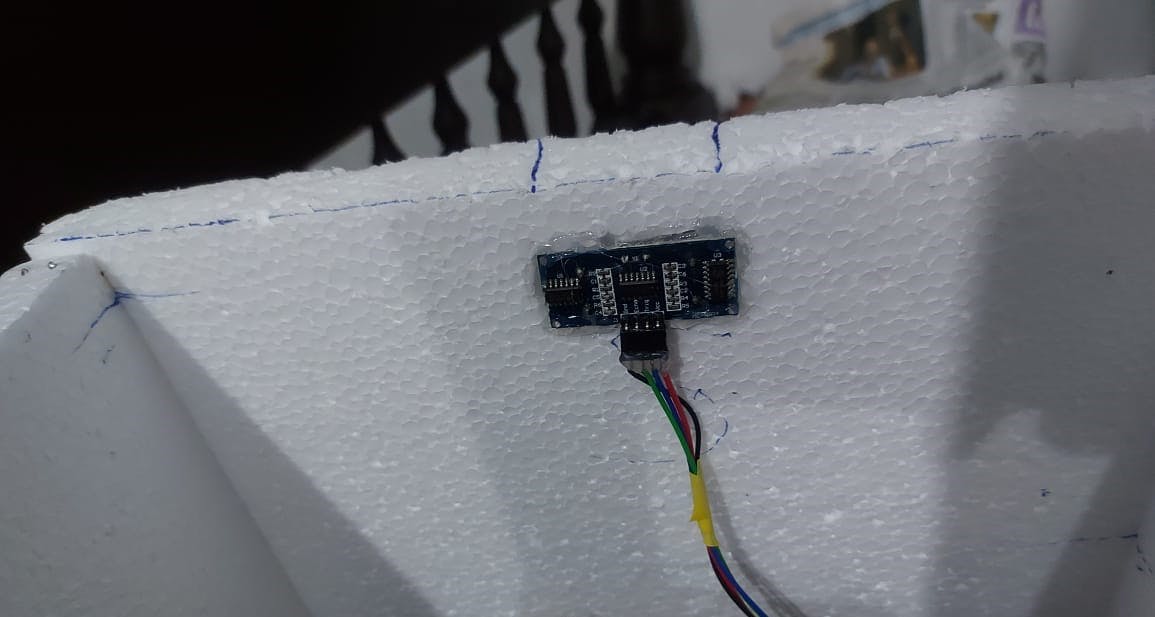
人体检测(pir传感器)

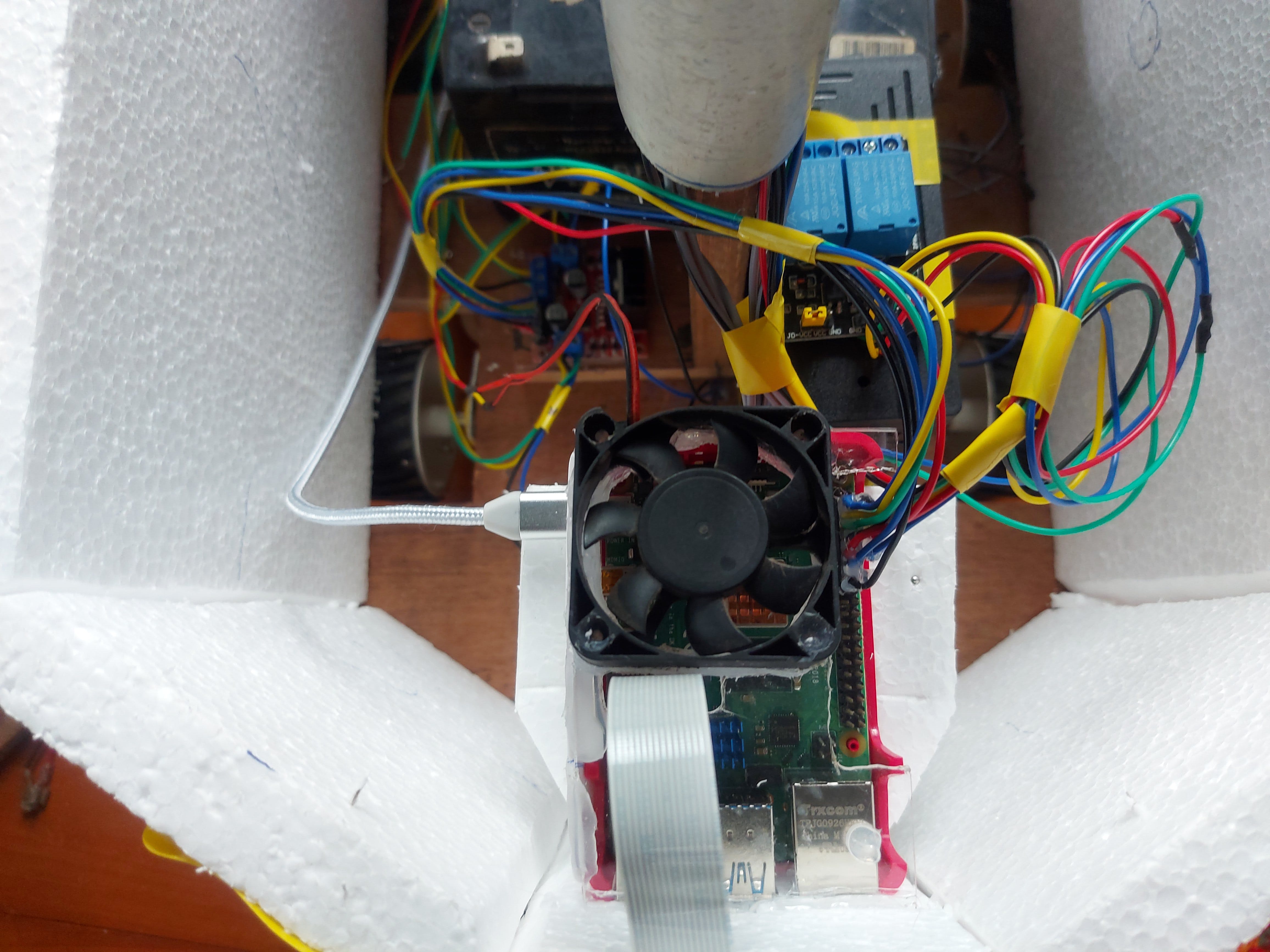
防撞(超声波传感器)和摄像头

在这里,我们的遥控消毒机器人在工作。当检测到人体暴露时,它会自动关闭紫外线灯。紫外线灯可以手动控制。
到达消毒地点时应开启。如果在操作过程中检测到有人存在,它将自行关闭。它必须手动打开才能再次工作。当机器人开始移动时,它会检测到前方 30 厘米的障碍物并停在那里并发出警报。如果我们看到它前面有障碍物并试图将其向前移动,它就会停下来。
这里是相机的意见
第 1 步:构建 UV 机器人
- 步骤 1.1:电机和框架
我们使用 4 Geared DC 12v 电机 100rpm,它具有高扭矩。电机安装在胶合板上。电机用夹子和螺丝安装好
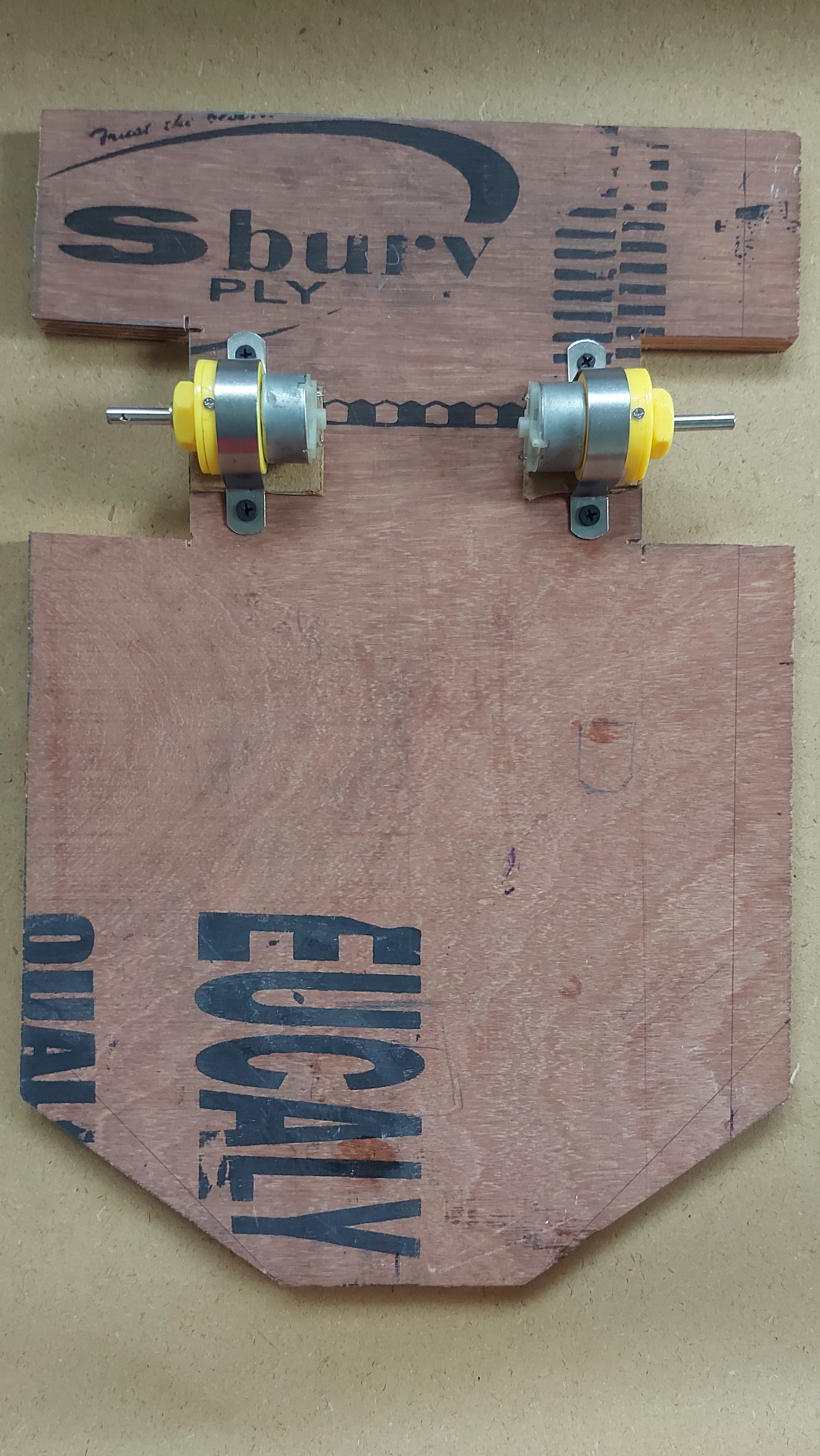
胶合板是该机器人的坚硬且良好的基材。它的尺寸是30cmx45cm。正面为半六边形,两侧为12cm,正面为9cm。
先只装两台电机,待紫外灯架完成后再装另一台电机。
然后按照上述方法将热管切割成正确的尺寸,下图是机器人的前部。

然后将切好的碎片放在胶合板上。

- 步骤 1.2:紫外线灯安装
UV灯架由长1.5m、直径50mm的PVC管制成。

管子的底部有一块小胶合板被拧紧。

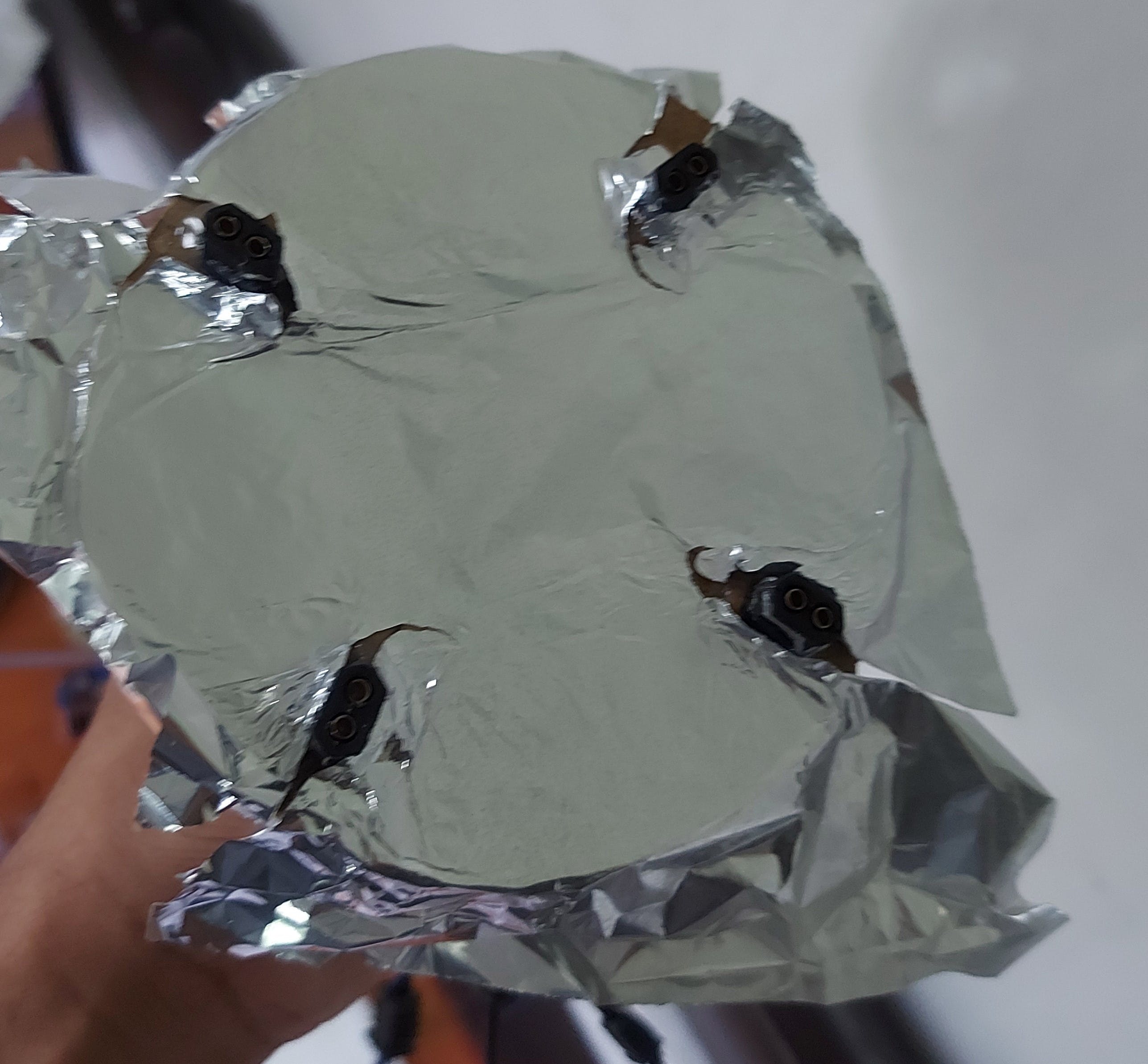
我们使用 4 根紫外线管,当机器人移动时,我们需要将紫外线照射到更广泛的区域和地板上进行消毒。所以我们可以使用铝箔来散光,并在PVC管周围放置4个UV管。
然后我们必须用铝箔层压PVC管。所以紫外线是反射的,我们可以对大范围进行消毒。

UV管需要灯座来固定pvc管的周围。我们需要一个重量轻的支架。所以它是用 thermocol 和厚纸制成的。为了放置 pvc 管周围的管子,我们需要将 thermocol 切割成圆形。

支架的中心部分是thermocol,另外两侧是厚纸片,还贴有铝箔。

为了给地板消毒,我们需要在机器人的顶部做一个反射器,所以我们做了一个伞形的反射器。



- 步骤 1.3:安全功能
然后我们需要访问一个安全功能,即人体检测,当检测到生物的运动时它会中断紫外线并防止危险的紫外线。
人体暴露
我们为此安全功能添加了两个 PIR 传感器。该传感器具有 7 米距离的 360 度覆盖范围。它安装在正面和背面。


小盒子是紫外线管驱动器。它适用于230v。
机器人碰撞
我们为此功能添加了两个超声波传感器,一个安装在背面,另一个安装在前面。当机器人遇到 30 厘米外的障碍物时,它会检测到并停止并发出警报。
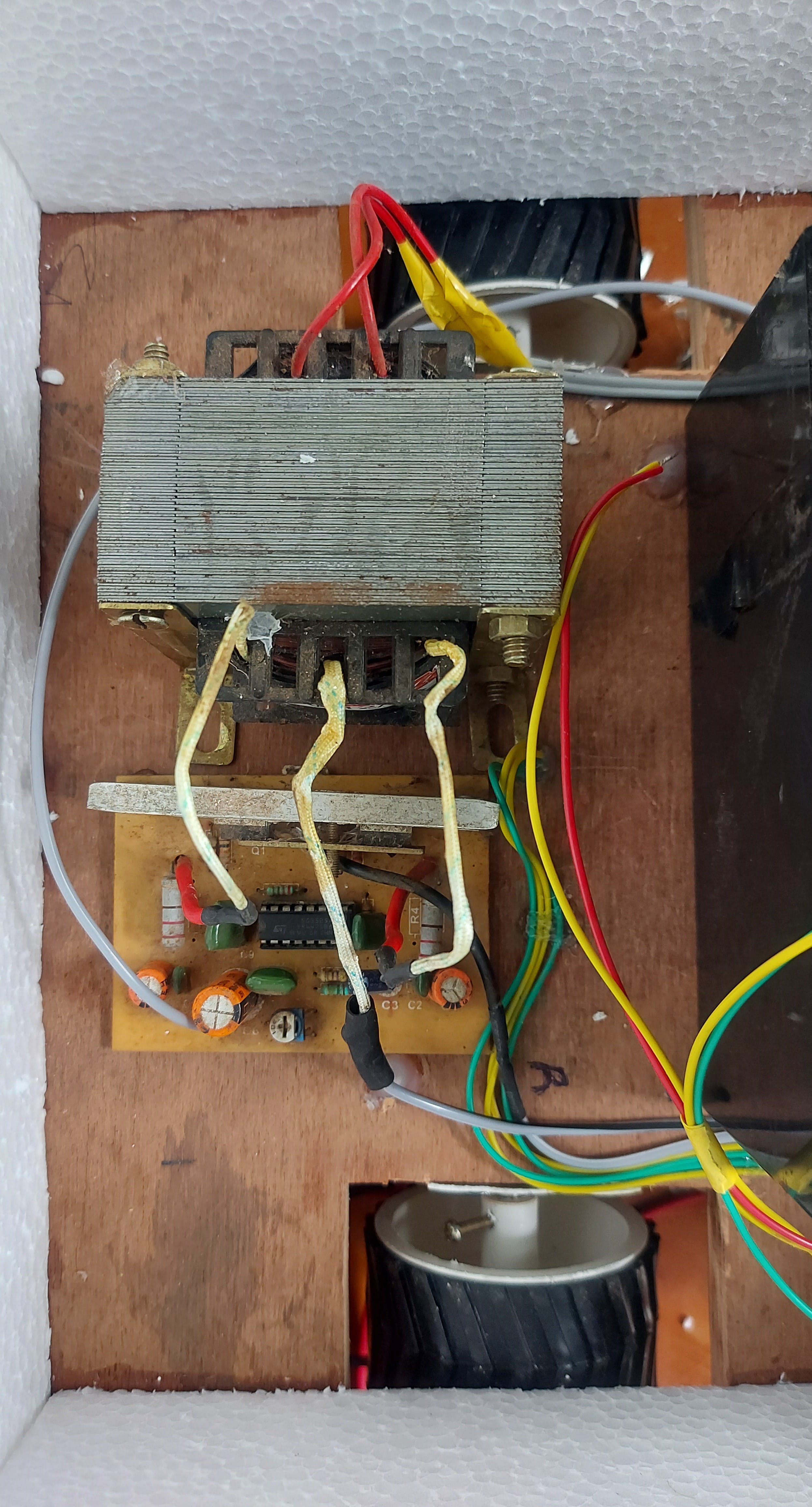
- 步骤 1.4:电子产品
我们需要为紫外线灯提供 230v,我们使用了 150w 逆变器
第 2 步:编码
你必须使用树莓派来控制这个机器人。这个项目是用树莓派4做的。它连接互联网,通过互联网控制,你可以监控机器人移动时的摄像头视图,还可以控制紫外线灯。
当机器人移动并手动打开紫外线灯时,突然检测到任何移动时,它会检测并自动关闭紫外线灯并发出警报。当机器人开始移动时,它将检测到前方30cm的障碍物并停在那里并发出声音警报。
在这里,我们使用键盘来控制机器人,当按下箭头键时,它会相应地移动并在按下“Q”和“W”时控制紫外线 - 开和关。您还可以通过更改编码来更改密钥。
- 步骤 2.1:设置树莓派
首先,您需要安装最新版本的 Raspbian。我建议从树莓派下载带有桌面和推荐软件的最新版本。
您必须下载该软件并将其安装到带有 pi imager 软件的 SD 卡中。然后你连接显示器,键盘,鼠标并启动它
安装操作系统后,更容易访问VNC、CAMERA。
要启用 VNC 和相机,请按照以下步骤操作,
选择 Menu > Preferences > Raspberry Pi Configuration > Interfaces 并确保 VNC 已启用以及摄像头
仅通过启用 VNC 不会显示相机预览,您将转到 VNC 设置
单击 VNC 图标 > 菜单 > 选项 > 故障排除 > 启用直接捕获模式并应用设置
- 步骤 2.2:安装库
导入库以向此代码添加特殊功能。
要安装库,请打开终端
首先我们需要pygame库来获取控制机器人的钥匙
sudo apt-get install python-pygame
用于导入库
import pygame
其他库是内置的库。所以我们不需要安装。
- 步骤 2.3:按键
使用pygame库导入此项目用于控制机器人的键盘键。首先导入pygame库
import pygame
初始化一个窗口
pygame.init()
pygame.display.set_mode((100,100))
创建一个从键盘获取键的函数
def getKey(keyName):
ans = False
for eve in pygame.event.get():pass
keyInput = pygame.key.get_pressed()
myKey = getattr(pygame,'K_{}'.format(keyName))
if keyInput [myKey]:
ans = True
pygame.display.update()
return ans
- 步骤 2.4:相机
之前启用了相机。我们必须得到预览
from picamera import PiCamera
from time import sleep
def piCam(w=200,h=100,x=0,y=0,fill=True):
camera = PiCamera()
camera.resolution = (w,h)
camera.start_preview(fullscreen= fill,window=(x,y,w,h))
- 步骤 2.4:电机、pir、超声波传感器和控制紫外线
电机驱动器、超声波传感器、pir 传感器和继电器端子连接到树莓派 GPIO 引脚
电机驱动器有 6 个引脚,三个引脚连接电机 1,三个引脚连接电机 2。两个使能引脚或 PWM 引脚,另一个引脚是每个两个电机的方向控制引脚。
对于前进方向
GPIO.output(In1A,GPIO.HIGH) # motor1 forward
GPIO.output(In2A,GPIO.LOW)
GPIO.output(In1B,GPIO.HIGH) # motor2 forward
GPIO.output(In2B,GPIO.LOW)
对于反向
GPIO.output(In1A,GPIO.LOW) # motor2 backward
GPIO.output(In2A,GPIO.HIGH)
GPIO.output(In1B,GPIO.LOW) # motor2 backward
GPIO.output(In2B,GPIO.HIGH)
设置脉宽调制
pwmA = GPIO.PWM(EnaA,100)
pwmA.start(0)
pwmB = GPIO.PWM(EnaB,100)
pwmB.start(0)
为了转动机器人,改变占空比,我们可以转动机器人。
添加 PIR 传感器以检测人体暴露。这里的代码
if GPIO.input(pir1): # pir1 is defined as pir1 = 18
print(" Detected ")
超声波传感器有 2 针 ECHO 和 TRIGGER(不包括 VCC、GND)
基本的距离测量是测量触发和回波之间的时间。我们可以用代码来测量时间
GPIO.output(TRIG, True)
time.sleep(0.00001)
GPIO.output(TRIG, False)
while GPIO.input(ECHO)==0:
GPIO.output(led, False)
pulse_start = time.time()
while GPIO.input(ECHO)==1:
#Check whether the ECHO is HIGH
GPIO.output(led, False)
pulse_end = time.time()
pulse_duration = pulse_end - pulse_start
distance = pulse_duration * 17150
distance = round(distance,2)
measuredDistance=measuredDistance+distance
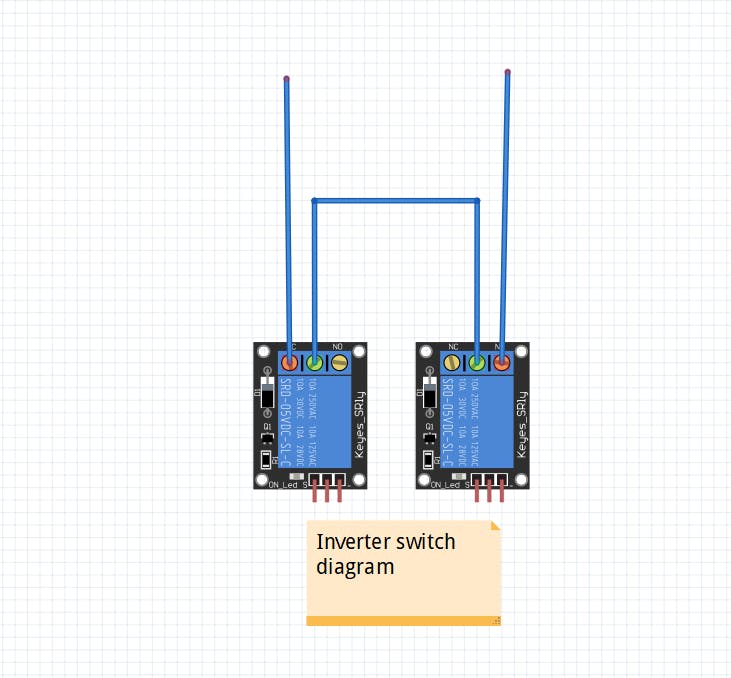
为了控制紫外线灯,请使用 2 通道继电器。
if getKey('q'): #for on
GPIO.output(Relay1,GPIO.LOW) # uv light on
elif getKey('w'): #for off
GPIO.output(Relay1,GPIO.HIGH) #uv light off
完成。然后运行。
结论
这种机器人可以用紫外线对大范围的区域进行消毒。在这种情况下,这种机器人对于医院、商场和其他人聚集的区域非常有用。
我们现在已经把这个机器人做成了可以远程控制的方式,如果我们使用激光雷达,我们可以自动控制这个机器人不受远程控制,减少超声波传感器的使用。它会更加准确和高效。然后我们安装了不可移动相机而不是移动相机,我们可以使用伺服电机将不可移动相机变成可移动相机。我们用了一个小的紫外线管,如果我们用一个大的紫外线管,照明率会提高,对大面积的消毒效率会更高。在使用大紫外线管时,我们需要更换逆变器。
COVID-19让全球数十亿人感到恐惧,所以我们打造了这样一款低成本的消毒机器人,唯一的目的就是参与抗击疫情。这款机器人拥有无限的未来可能性。我们希望您能够以最有效的方式使用它。
谢谢阅读!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




