
资料下载


使用UVC和垃圾场材料的自主消毒机器人
刘玉兰
分享资料个
描述
完成我们的原型
其他消毒项目及其缺点
- 最近开发的一些可以执行消毒任务的工作机器人,它们的体型巨大,它们使用的硬件成本很高,这可能是大规模生产和部署在医院/诊所/公共场所的巨大障碍。
- 这些机器人不能用于某些必须保持干燥环境的地方,例如 ICU、研究实验室、工厂、生产车间,而且并非所有这些地方都是完全自动化的。此外,这些机器人需要某种人类帮助来引导自己、穿过拥挤的区域等。
- 对于像我们这样的欠发达国家,他们负担不起制造这些机器人的费用。这些原因使人们在医院、诊所等没有适当的防护装备的情况下用手进行消毒。
UVGI 如何提供帮助
紫外线杀菌辐射 (UVGI) 是一种消毒方法,它使用短波长紫外线(紫外线 C 或 UVC)光通过破坏核酸和破坏其 DNA 来杀死或灭活微生物,使它们无法执行重要的细胞功能。UVC 被 RNA 和 DNA 碱基吸收,可导致两个相邻的嘧啶光化学融合成共价连接的二聚体,然后成为非配对碱基。
UVGI 用于多种应用,例如食品、空气和水的净化。UVGI 可用于预防某些传染病的传播。低压汞 (Hg) 放电灯和 LED 常用于 UVGI 应用,并发射短波紫外线 C(100–280 纳米)辐射,主要为 254 nm । 资源
我们的解决方案
IR-Beacon 引导使用 UVC 和垃圾场材料的自主消毒机器人。
机器人功能:
- 消毒过程:阳光包含三种类型的紫外线。首先是 UVA,它构成了到达地球表面的紫外线辐射的绝大部分。它能够深入皮肤,被认为是造成高达 80% 的皮肤老化的原因,从皱纹到老年斑。其次是 UVB,它会破坏我们皮肤中的 DNA,导致晒伤并最终导致皮肤癌(最近科学家发现UVA也可以做到这一点)。还有第三种类型:UVC。光谱中这个相对模糊的部分由更短、能量更高的光波长组成。它特别擅长破坏遗传物质。要安全使用 UVC,您需要专业设备和培训。世界卫生组织 (WHO) 已对使用紫外线消毒的人发出严厉警告。 我们的全自动系统来了,它能够自行运行。
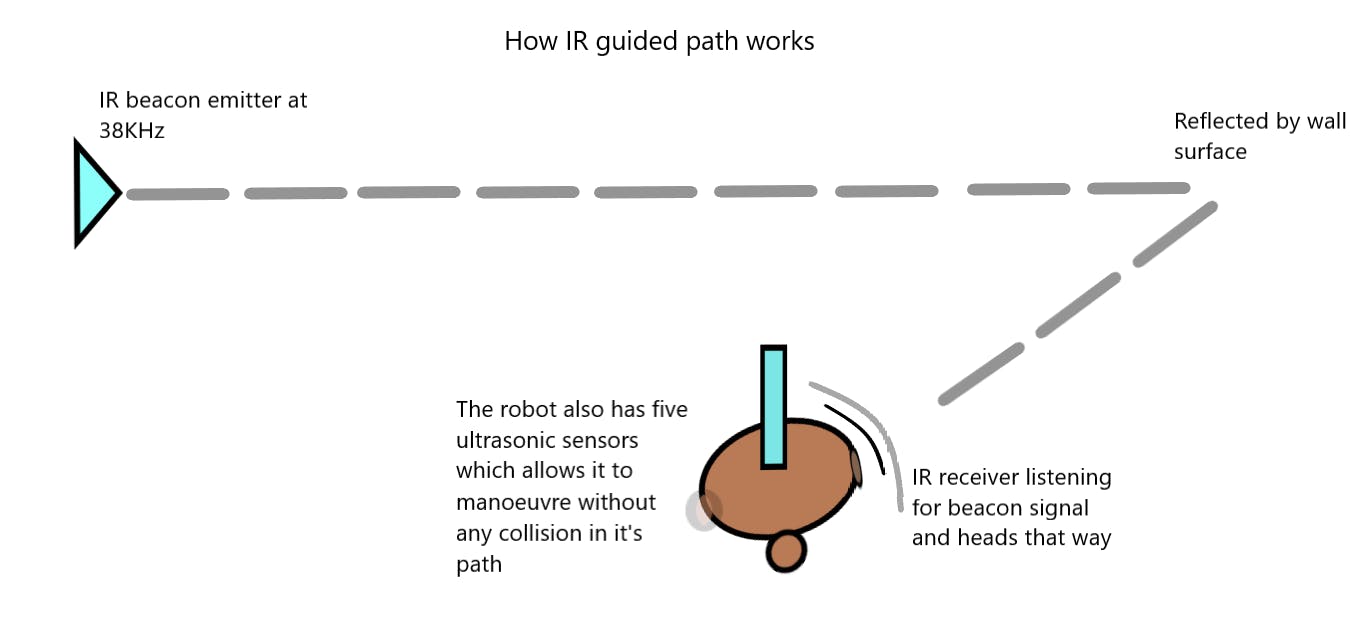
- 自主引导路径:在房间的出入口位置将有两个红外信标站,用于引导机器人进出。然后志愿者可以在不进入的情况下收集它。
- 自主运动:通过周围的超声波传感器实现自主运动,使其能够避开进入其路径的障碍物。| 关联

设计指标:
- 物理尺寸:所有测量值都可以在我们附加在附件部分的设计文件中找到。
- 安全(灯自动关闭):我们使用专用电池(3s LiPo 1100mAh)为灯供电。但我们还没有运动感应。相反,我们保持每次激活大约 30 分钟的时间顺序。之后,灯将关闭。并且需要手动开启。
- 安全性(稳态推力):我们的机器人总重量约为 2kg。我们正在使用两个直流有刷齿轮电机,每个电机的扭矩为 1kg。因此移动它所需的力更小,也小于 8kg。
- 安全(UV On Indicator):我们集成了带有微控制器的继电器来打开 UV。所以这种方式继电器板指示UV是否打开。
- 自动化接口软件/用途:Web-app。
- 控制:用于手动控制和红外信标引导自动驾驶的网络应用程序。
- 成本 - 总单位 BoM:约 200 美元(孟加拉国货币:BDT-16,000)。
- 灯寿命计数器:因为 UVC 灯是通过继电器板触发的。因此,我们可以通过知道它何时打开和何时关闭来维护生命计数器。
- 操作日志:我们的系统涉及树莓派,用户可以从中跟踪时间。此外,我们使用的是安卓手机,它有内置的 GPS 来了解位置,但不像激光雷达或 VSLAM 技术。
- 电源:使用 11.1volt 3300mAh 3s LiPo 主电池进行电机驱动,也用于为传感器和微控制器供电。另一个 11.1volt 1100mAh 3s LiPo 电池用于点亮 UVC 灯。
- 投影灯可靠性:约 9000 小时 | 资源
- 维护灯更换:我们的 UVC 灯罩使用户能够非常轻松地更换灯。这样维修人员就不需要高素质了。
- 重量:约2.0kg
- 可靠性:我们使用胶合板制造底盘。在正常情况下,胶合板具有高强度和耐用性。我们还应用了防水涂层,使其防水。通过这种方式,我们认为如果我们的微控制器和其他传感器正常工作,机器人将能够保持 6 个月(至少)。
我们如何构建它:
底盘设计:
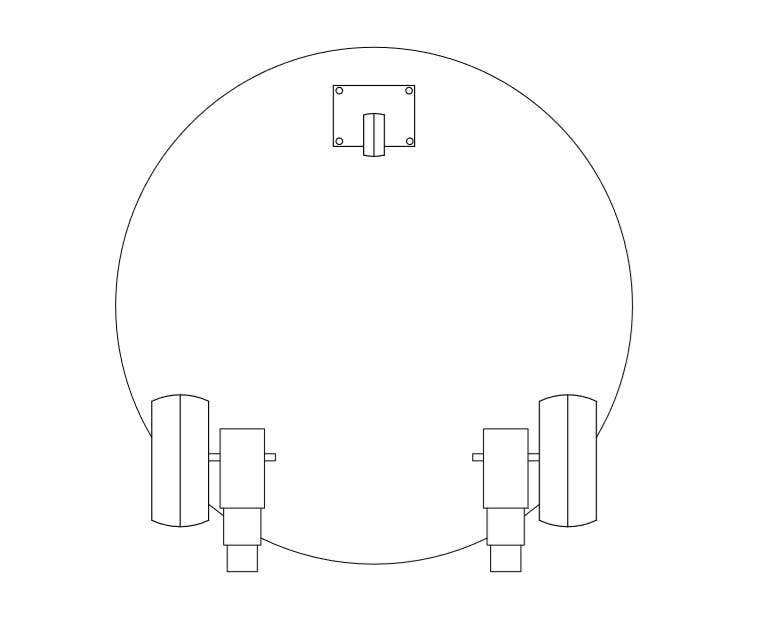
使用 AutoCAD 设计软件进行测量和调整制造过程。最后附上设计文件。
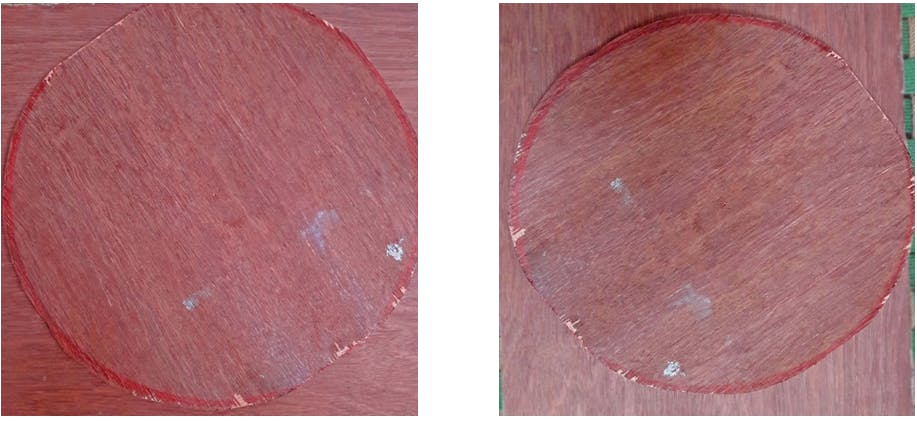
底盘制造:
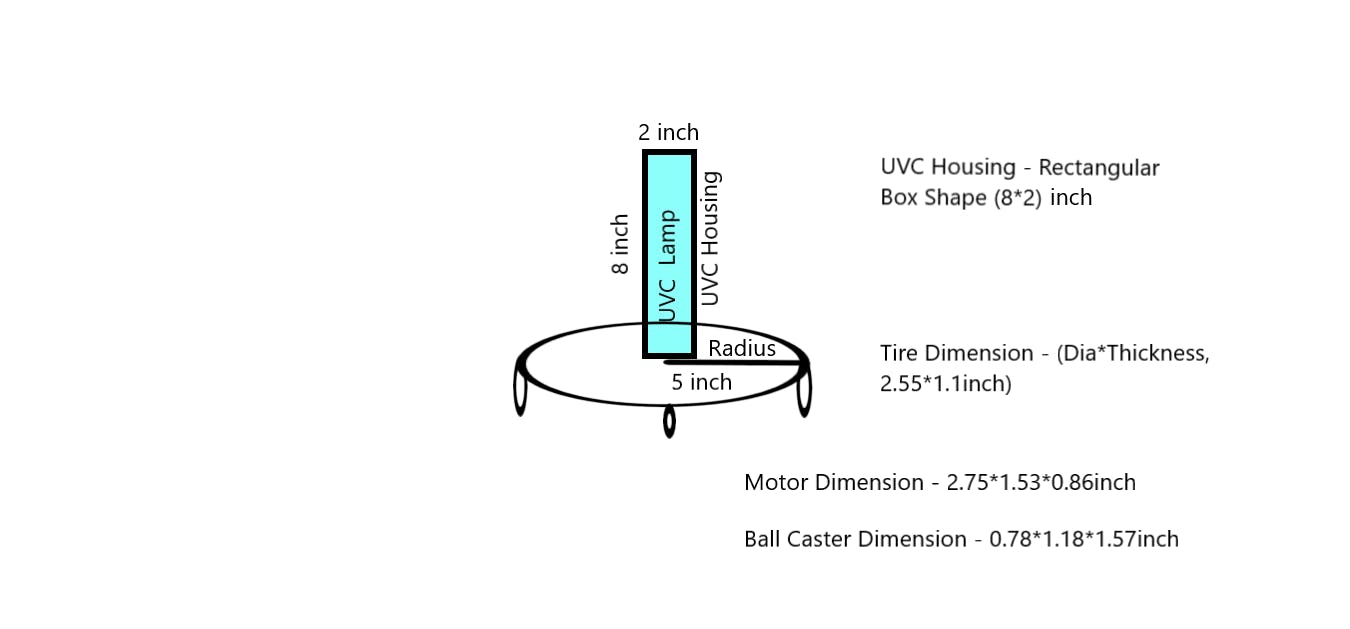
机箱由胶合板制成,在大多数五金店都很容易买到。如果它的建造方式可以穿越所有区域并且所有设备都可以轻松安装。为此,优选的形状应该是圆形/椭圆形。机箱圆形半径为 5 英寸。
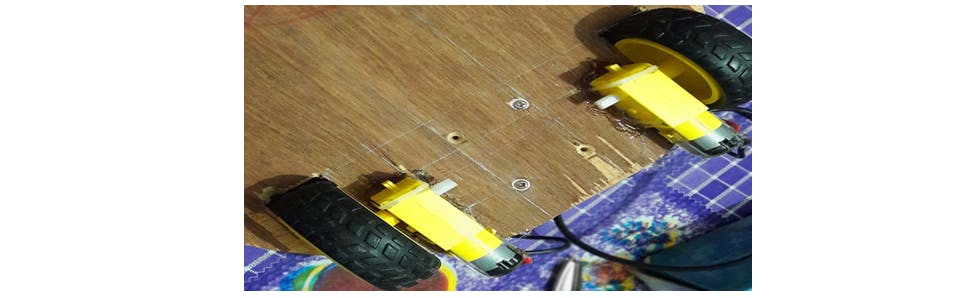
驱动电机和车轮安装:
所有测量值都可以在 AutoCAD 设计 (.dwg) 文件中找到。
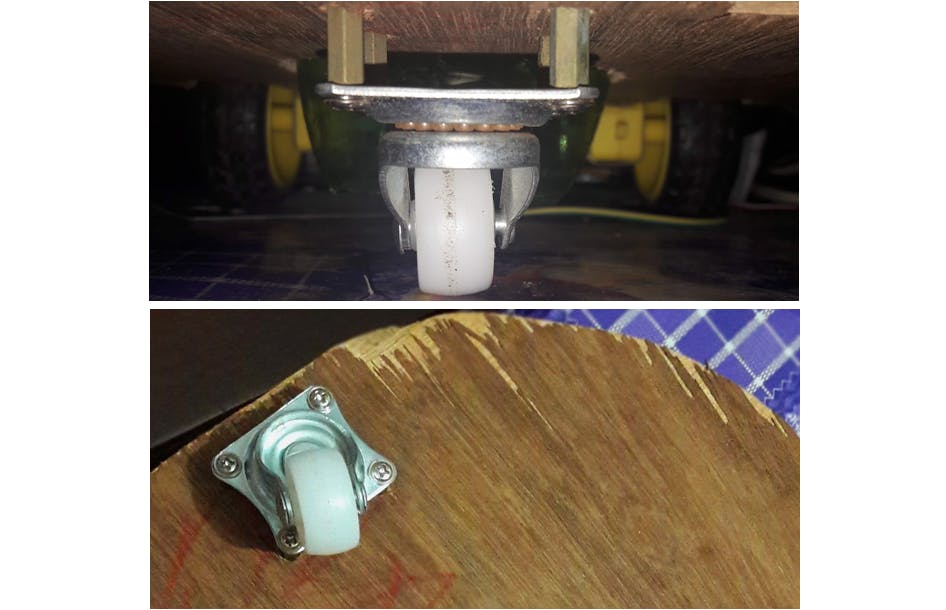
脚轮安装:
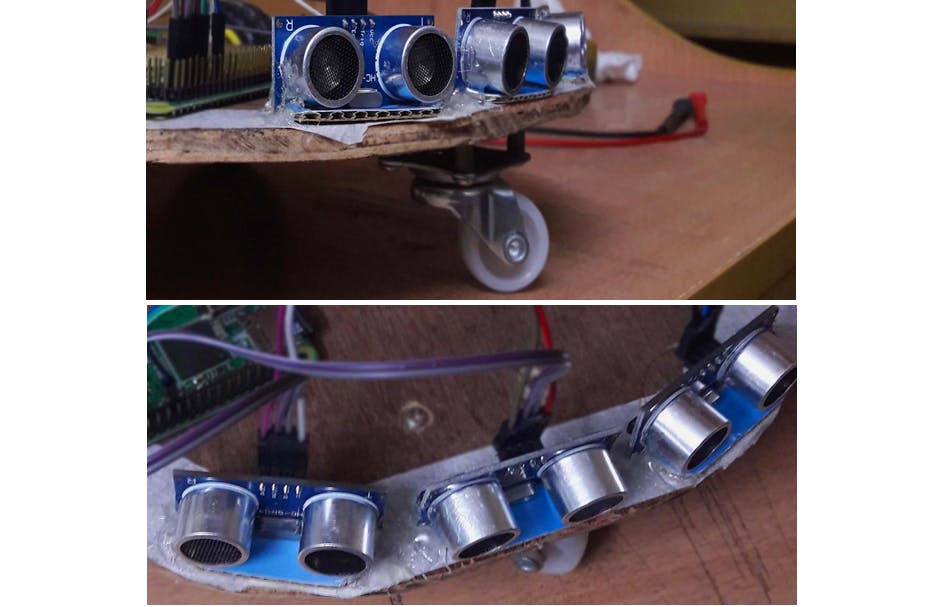
在底盘上安装声纳传感器:
使用胶枪将声纳传感器安装在底盘主体上,并使用纸板纸使它们升高和平衡。
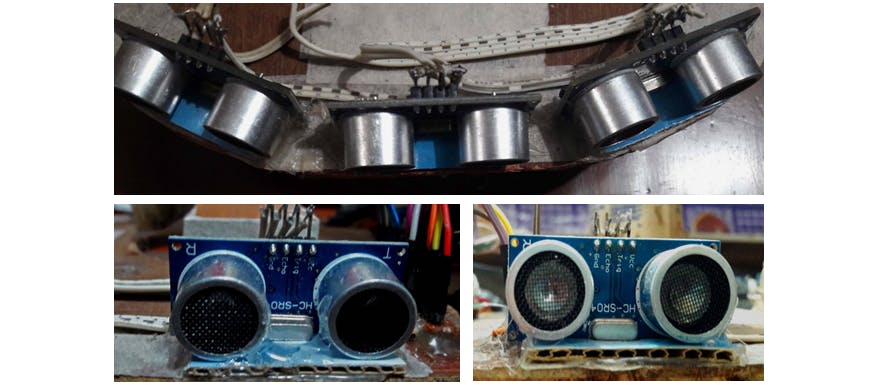
最终声纳组装和焊接:
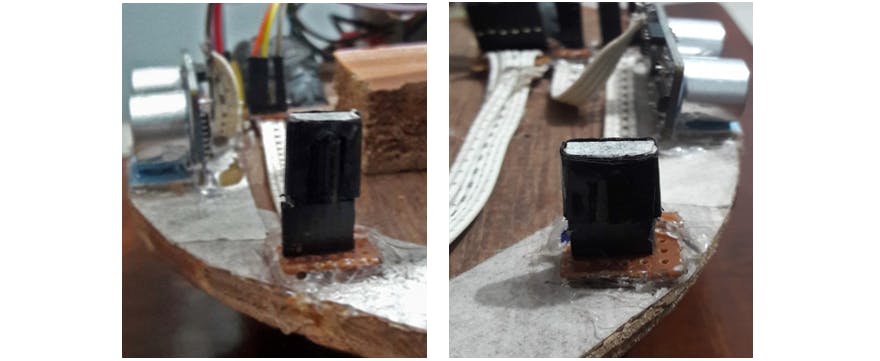
在机箱上安装红外接收器:
使用焊接在 Vero 板上的母头针连接 IR 接收器并将其热粘在机箱上,连接的白线用作 VCC、gnd 和 Signal。
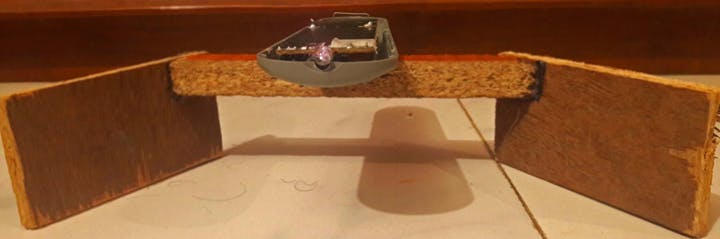
红外信标外壳组件:
IR 信标/发射器电路是从有一些按钮故障的旧电视遥控器中提取的。为了让信标始终工作,不得不短按一个按钮。信标产生 38KHz 的频率,机器人试图遵循该路径。
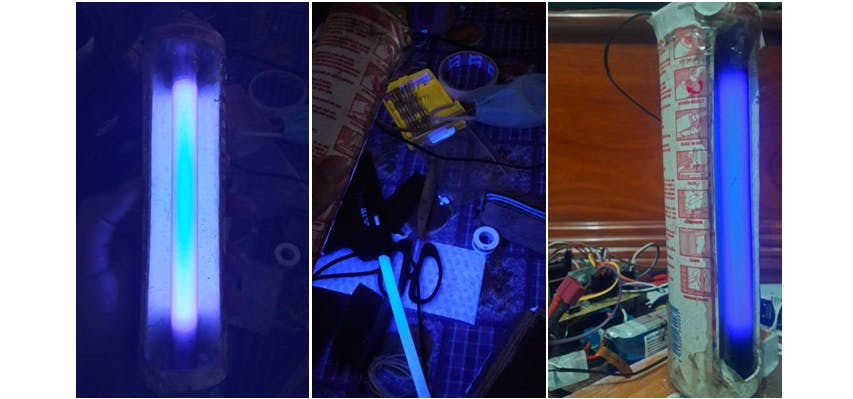
UVC灯安装:
我们不得不购买 4watt UVC 管灯。由于灯在沿着身体移动时需要便携,因此需要一个逆变器电路。示意图可在贡献者链接上找到。该电路从 3.7 伏 1100 毫安时的锂电池中获取能量并为灯供电。
UVC 剂量计算:
在大多数研究论文和文章中,研究小组以“焦耳每平方米”或“焦耳每平方厘米”的形式提到了灭菌过程所需的紫外线。但是在考虑紫外线灯的参数和规格时,制造商给出了距离为 1 米的“每平方厘米微瓦特(uW)”的紫外线强度。
剂量(J) = 强度(W) × 暴露时间(s) ... (1)
此计算的结果将是一个以 μWSec/cm² 表示的值 | 资源
距离 r 处的强度 ∝ 1/r^2 ... (2)
等式1显示了剂量和强度之间的关系。得出的结论是,不同的剂量可以通过改变对同一紫外光源的曝光时间来实现。
紫外线强度与距离之间的关系如公式2所示。据此可以得出结论,紫外线强度随着距离光源的距离而降低。
最终电路组装:
电路图可以在fritzing文件中找到。
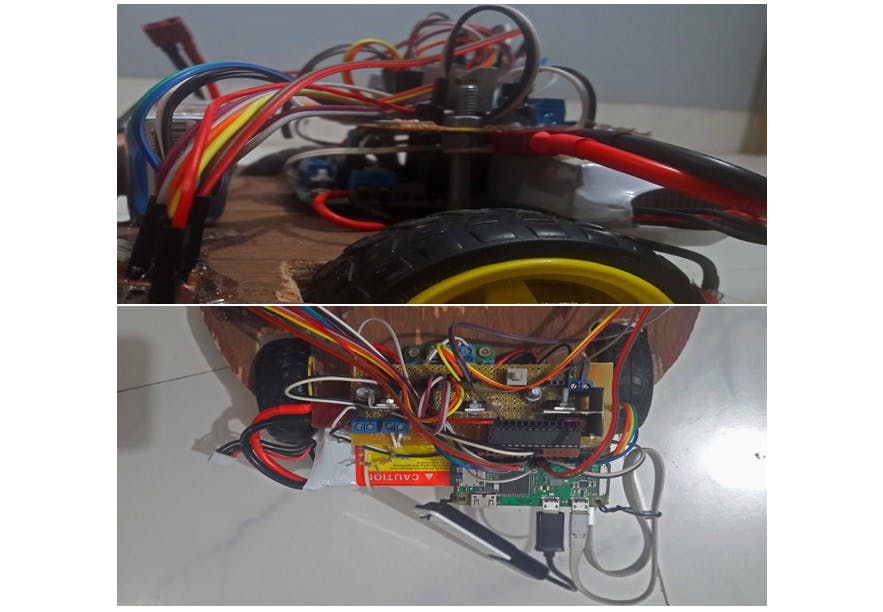
一些说明:
- 我们使用了模拟传感器(如 IR 接收器)来读取使用 ATMega328p 的传感器值。
- ATMega328p 提取传感器数据,执行 Arduino 代码并生成电机控制字符串,例如:前向、左、右,使用串行端口(从微控制器读取 tx 引脚)发送到树莓派。
- 树莓派和 Arduino 之间的串行通信设置程序,可以在贡献者链接部分找到。
- 我们使用逆变器电路来点亮 4W UVC 灯。示意图也可以在贡献者链接上找到。
- 我们使用外部 wifi 适配器以获得更好的连接性。外部适配器不是强制性的,也可以使用内置适配器。
为什么要考虑这个
- 可以保持干燥的环境
- 没有液体填充开销,没有志愿者参与
- 完全通电,只需充电
- 用于自主控制的 IR-Beacon 引导路径
- 还能够避开沿途的障碍物
- 廉价的垃圾场材料确保低成本和快速的大规模生产
- 体积小,圆形,移动更灵活
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





