
资料下载


XentrinoBot UVR2(紫外线机器人)开源
杨平
分享资料个
描述
Covid-19 病毒无处不在,这些都是人们居住的各种大小的区域:小房间、宽阔的医院、狭窄的街道、巨大的健身房和开放的市场。因此,弱势群体面临感染 Covid-19 病毒的巨大风险。看不见的纳米野兽可以在不同的表面停留一个小时甚至几天。
一种可靠的解决方案是消毒, 因此我们对抗由 Covid-19 病毒引起的疾病是通过清洁我们的栖息地。我们将使用机器人搬运紫外线灯作为我们的消毒工具。紫外线灯经临床证明和测试是杀死细菌和病毒的有效手段。.然而,紫外线会发出对人体健康有害的“辐射”。
因此,保护人们免受风险也是重中之重。XentrinoBot 版本 UVR2 可以很好地完成这项工作,因为它具有机器视觉/AI 设计、远程操作、自主或手动可控性并提供高水平的安全性。
计划: 在消灭病毒的过程中,我们的机器人将尽可能地取代人类。机器人能够在消毒操作之前、之中和之后的任何时间或任何情况下保护周围区域的任何生物。
解决安全风险: 1) 之前,遥控器、定时器、紫外线辐射监测发生故障。
2)期间,宠物、儿童或动物在危险区域的突然干扰。
3) 确定覆盖区域后,紫外灯辐射关闭,系统关闭。
4)紫外线灯的精确高度和方向,以确保消毒精度和安全性。
解决控制能力:
1)系统在消毒和空运行前需要自我系统检查以确保安全。
2) 机器人在操作过程中应对突然干扰的物体进行识别和保护,并立即应用安全协议。
3)机器人应确定覆盖区域,可以自主消毒(便于导航)或由操作员控制的网络。
4) 机器人还应控制附加范围的紫外线灯辐射覆盖范围。
寻址实用性: 1)应少机械零件。
2) 机器人或系统可转换为小面积或大面积使用。
3) 它对于易于构建和大规模生产来说是负担得起的。
4) 材料应该是低成本和本地可用的,它配备了McRon 激光雷达。.
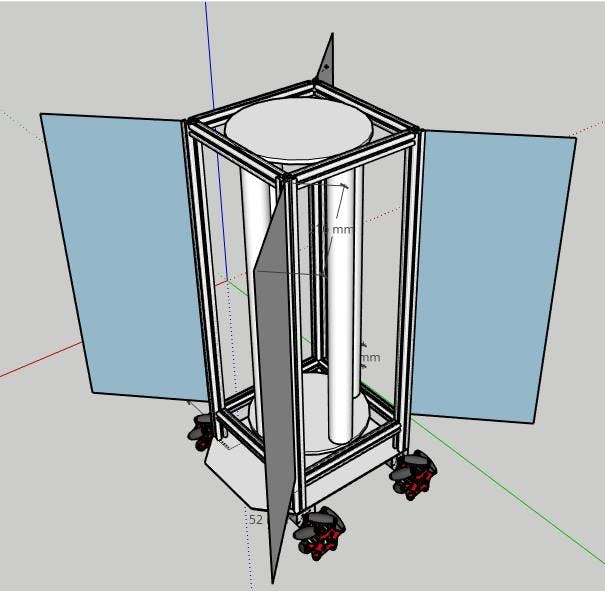
该设计:
该组件使用 4WD Omniwheel 多配置机器人,该机器人使用 Hi-Techno Barrio 机器人平台。这包括驱动四 (4) 个电机的定制控制器。
三(3) 个紫外线灯:
1) 在机器人底座下方安装了一个迷你紫外线灯。
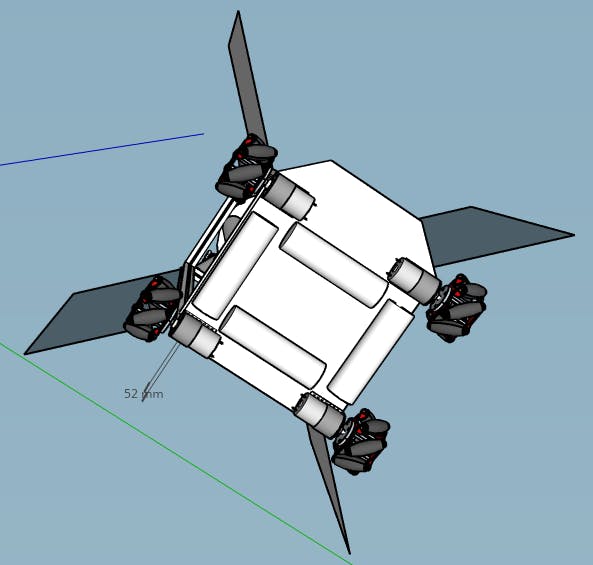
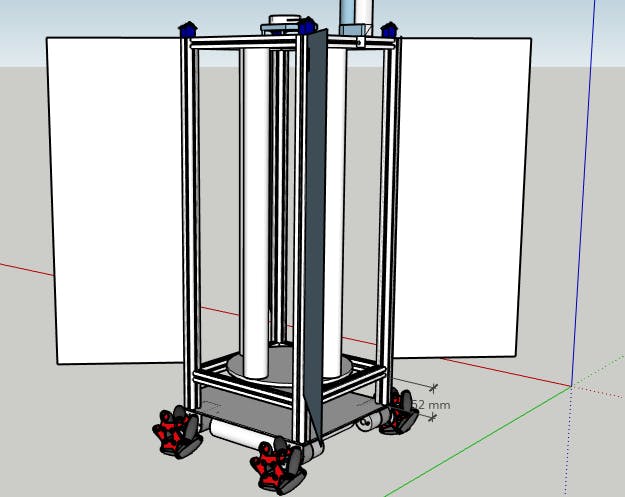
2) 在底座的表面,安装有外壳框架。它是一个 20 x 20 铝制 T 型材的螺纹连接方形,将四 (4) 个 UV 灯作为其外壳。
3)另一个紫外线灯由电动执行器携带,可用于扩大高度,如桌子、椅子和其他器具。
1) 对于小房间,机器人可以转换为像真空吸尘器一样工作。该配置只是带有迷你紫外线灯的机器人的基础。
2) 但是对于大面积覆盖,机器人可以转换为使用四个紫外线灯,或者可以配置为包含更多灯。
3) 机器人和紫外线辐射的力量都是可扩展的和可定制的。
4)机器人消毒可以达到更高的高度,光线聚焦精度更高。
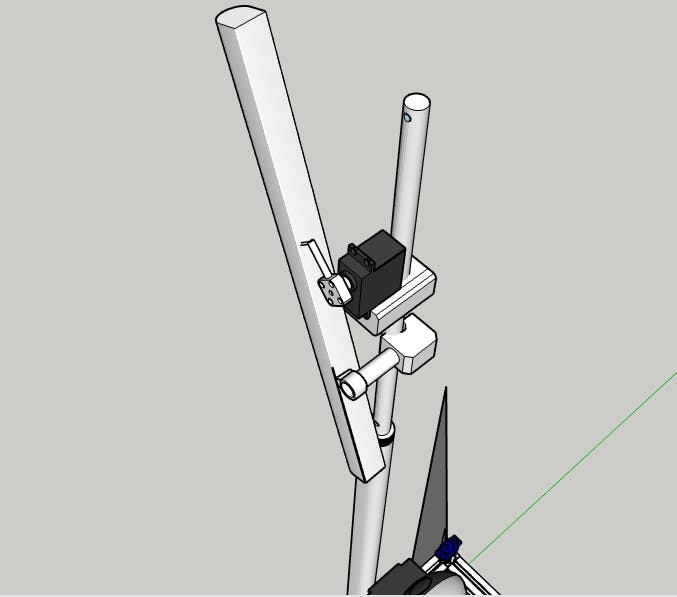
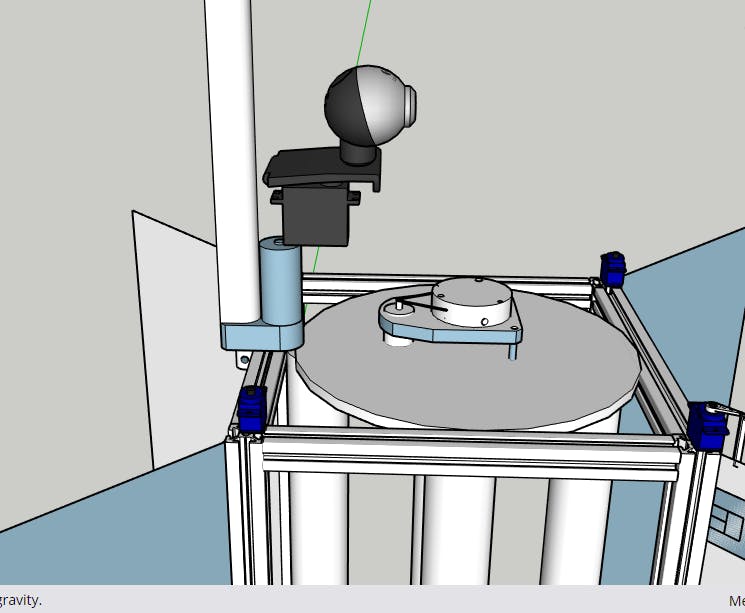
在框架的顶部,每 90 度角安装一个伺服器来打开和关闭胶合板。还在其开口处安装了紫外线传感器。
最顶部是安装在相机上的激光雷达,相机固定在伺服电机中。
XentrinoBot-UVR2
传感器:
MacRon LIDAR ,RPLidar, UV light Sensor (CAD, Design,Assembly and Test Camera Positioning LIDAR)
MacRon LIDAR 360 度扫描测试。
构建和组装:

硬件: 紫外线荧光灯 - 用于 Covid-19 消毒的工具
迷你紫外线灯 - 位于机器人底座下方,以覆盖其路径上的消毒
紫外线传感器=检测紫外线是否存在
Xentrinobot 机器人平台-通用移动机器人平台(Hi-Techno Barrio )
Mechanum/Omni Wheel 4WD- 全向移动机器人选项
激光雷达 - 地图、区域、距离扫描仪
窗罩-打开和关闭每个分段部分或整个紫外光发射通道。
软件:
NodeJs,灯插座服务器
HTML-web gui 模板
Javascript - 网页脚本
Arduino IDE-MCU编程IDE
OpenCV/YOLO- 用于机器视觉(物体和人脸检测)
设计参考:
机器视觉对象检测
带 Python的 RPi 伺服控制
RPi Control 4WD 麦克纳姆轮
RPi LIDAR XV11 扫描仪
带紫外线传感器的 RPi
RPi ROS导航
操作:
1)自主,在机器人自主运行模式下,其系统首先对电池进行自检,以确保电源的可持续性。然后,传感器,它感应激光雷达测量,以便系统能够检测到物体的进餐时间。激光雷达提供的周围距离用于创建地图。机器人可以使用此地图进行导航以及找到该区域的中心。这样做,机器人可以均匀地最大化光辐射的发射。该系统可以使用 ROS 应用 ALCM 或 Hector SLAM 或仅使用微控制器嵌入式 SLAM 进行自主导航。
2)安全性:机器人自主操作,具有极高的安全性。在消毒过程中,激光雷达独立扫描区域周围。系统(程序)对伺服系统能够定位其相机的任何干扰、运动或物理干扰都很谨慎。相机能够抓取图像以直观地识别距离测量变化的原因。机器视觉 AI(对象,通过 OpenCV/Yolo 进行人脸检测和识别)用于验证对象。
如果物体是生物,它将立即关闭覆盖紫外线正在/正在撞击物体的区域的窗口片。机器人将发出声音警报或闪烁的灯光,以防止危险区域内有任何生物存在。系统将提醒操作员有关紧急情况。另外,为了确保光线被覆盖,还有一个紫外线传感器,如果紫外线仍然可以辐射,它会给出反馈。在紫外线灯的整个覆盖中添加这种分段式窗罩的独特之处在于它可以在不停止整个消毒过程的情况下确保安全。因此,它可以消毒和保护最大程度的安全。
3)可控性,机器人的可控性可以通过它使用麦克纳姆轮子的容易移动来评估。这种多向轮使机器人能够以精确的方向和位置前往该区域的任何地方。由于包含的激光雷达正在馈送地图;机器人可以识别并移动到一个中心,以有效且均匀地最大化光发射。该机器人还能够检测其电池电量并能够显示其操作的剩余时间。机器人的操作员可以设置消毒的持续时间,每个紫外线灯的电源。操作者还可以通过其伺服电机控制直线执行器,以延长紫外线消毒的高度和位置。操作员可以在紧急情况下以自主或远程控制的操作模式关闭整个系统。
4)远程控制,机器人通过单板计算机(RPi4/Jetson Nano)托管的网络进行远程控制。它有一个控制面板来命令机器人,例如方向、其 SLAM 地图的 GUI、监控功率水平和目标区域机器人的实时远程视图。此外,机器人还有一个警报框,可在以下情况下激活:
1) 物体干扰
2) 电源中断
3) 在灯光禁用期间检测到紫外线泄漏(通过紫外线传感器)。
发现与意义:
应用 XentrinoBots 紫外线机器人 (UVR2) 的结果是一种可靠、实惠且实用的大规模生产机器人。可控性和安全性只是有效地杀死 Covid-19病毒,人们远离紫外线辐射和病毒感染的风险环境。XentrinoBot-UVR2 解决了使用带有紫外线灯 Covid-19 病毒消毒的移动机器人的所有挑战。该项目是开源的,其技术可在线获得。还考虑到所包含的材料价格合理且可在当地获得。
消毒方便快捷,覆盖范围广,无需触摸即可灭活病毒。这样我们就可以使用和控制机器人来保证我们的安全。
意义在于,通过将现有技术与新型防护罩和人工智能独特地结合起来,XentrinoBot UVR2 可以有效杀死 99% 的病毒(经临床证明)并确保 100%的高水平安全性(实时自动防护罩)保护人的生命(使人们远离消毒风险)
谢谢!
“我们将合而为一” Hi-Techno Barrio
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




