
资料下载


Pinaka:UVD(紫外线消毒)机器人开源分享
王丽
分享资料个
。
我们在原理图部分提供了原理图及其 fritzing 文件

硬件:该硬件可以使用 3D 打印机构建,从而降低其成本。
-
Wheels:我们使用了麦克纳姆轮,它可以在拥挤的环境中提供极佳的机动性和机动性。
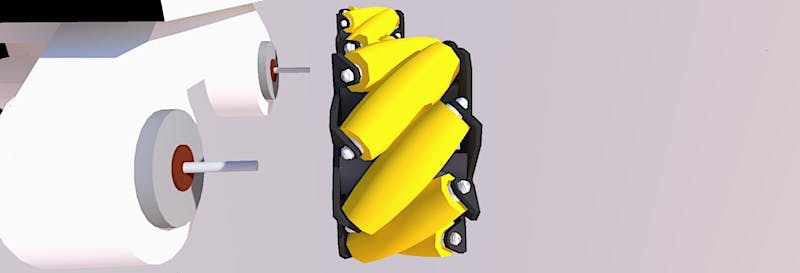
它提供全方位运动,成本较高,但由于我们的整体设计成本较低,因此我们的材料清单不会增加太多。这些轮子需要较少的维护和较长的生命周期,并且在所有类型的地面上都能有效地发挥作用,并且工作非常平稳。
-
Physical Dimension:所有测量值都可以在我们附在附件部分的设计文件中找到。 -
Safety:该系统使用 PIR 传感器检测人的存在,然后在检测到人离开后打开 UVc 灯进行消毒,并在 15 分钟后自动关闭。
我们设计了两种模式的 UV 流动站,以确保更好的安全功能,并在发生碰撞时避免对机器人造成损坏。
- 模式一:-

这是更简单版本的 UV 流动站,在这种情况下,如果放置在其顶部的流动站传感器检测到有人存在,则 UV 灯将关闭并保持关闭状态近 1 分钟,然后启动再次。这是一个成本非常低的简单版本,而且重量也很轻。
- 方式二:-
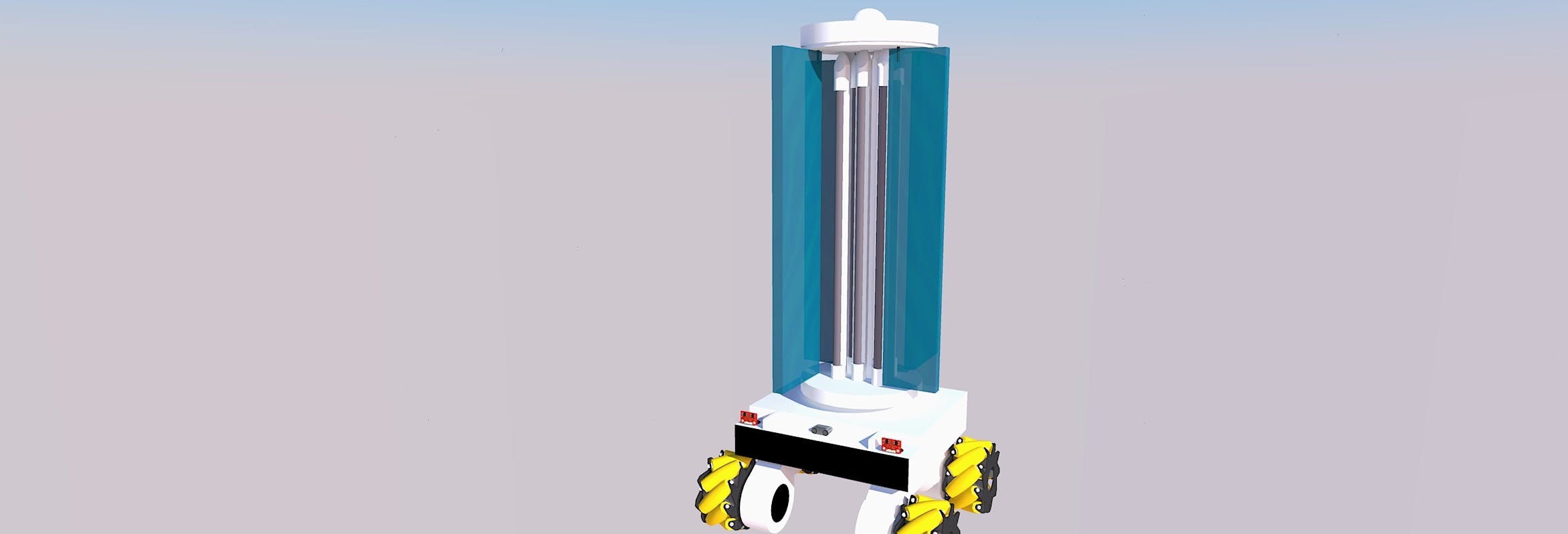
这是 UV 机器人的更高级版本,仅比模式 1 版本稍微贵一点。但是这个版本更复杂,更耐用,它提供了很好的安全功能和防碰撞安全性。
在这种情况下,如果放置在其顶部的流动站传感器检测到人类存在,则安装在紫外线灯周围的眼镜将像窗户一样关闭,灯也会关闭。紫外线将无法穿透玻璃。这个版本可以用在我们要使用的更强大的灯的地方,因为很少的紫外线照射是有害的,这些眼镜可以防止这种情况发生,如果机器人与墙壁或任何物体发生碰撞,这些眼镜将吸收冲击和防止灯泡破裂。
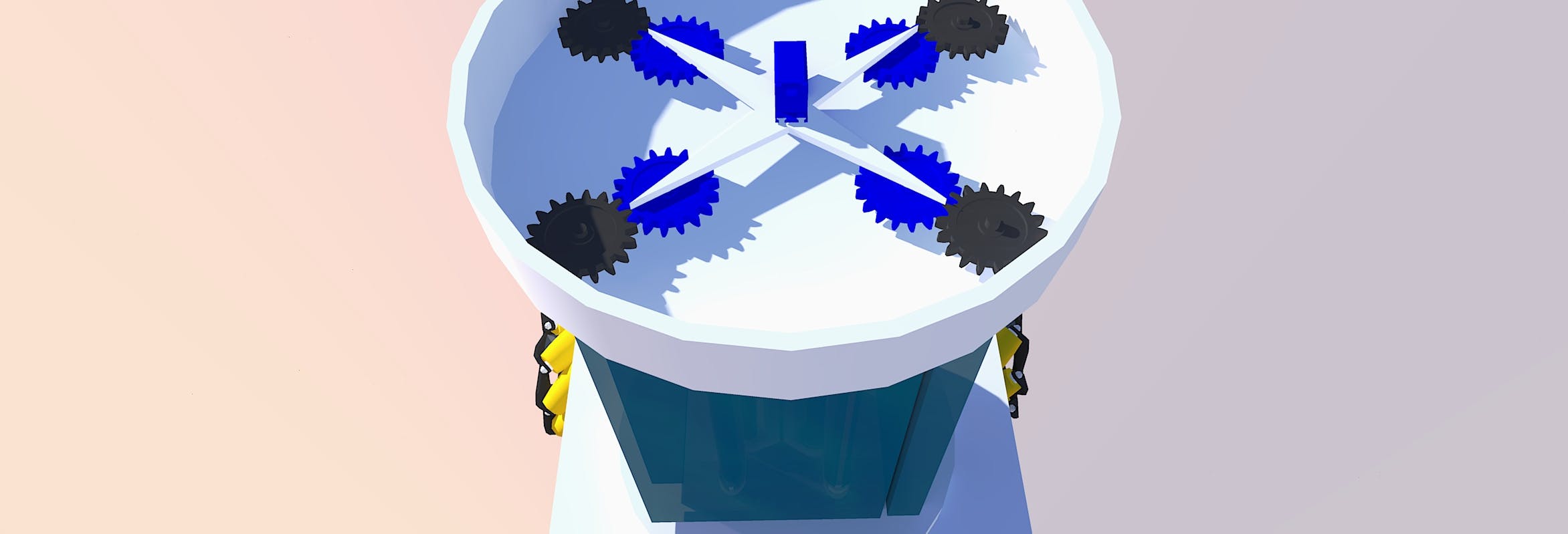
当PIR传感器感应到人体存在时,它会发出一个高电平信号给安装在中心的伺服电机(蓝色矩形框内装有电机),它会在右侧旋转一定角度,旋转其他齿轮,使窗户关闭当传感器发出低信号时,它会将齿轮向左旋转相同的量,再次打开车窗。
UV 机器人的额外功能
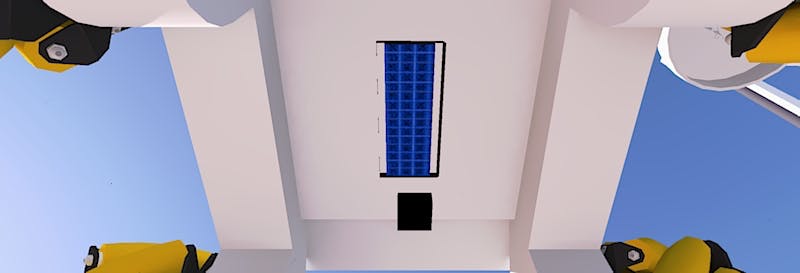
我们还在 UV 机器人的下侧安装了一系列 UV LED,为机器人下方的地面提供额外的消毒辅助。
主要特点
- 通过网络浏览器控制。
软件 3:-
如果你不能理解这个软件,如何使用它部署在硬件上并且觉得困难,我推荐你
https://www.hackster.io/maciek85/raspberry-pi-car-with-fpv-camera-controlled-by-a-smartphone-0c0997
我们的电路设计灵感来自这个项目及其可用的软件和免费的云服务remoteme.org 。您可以轻松部署他们的软件,并可以使用您自己的手机进行控制。
PIR 传感器原理图
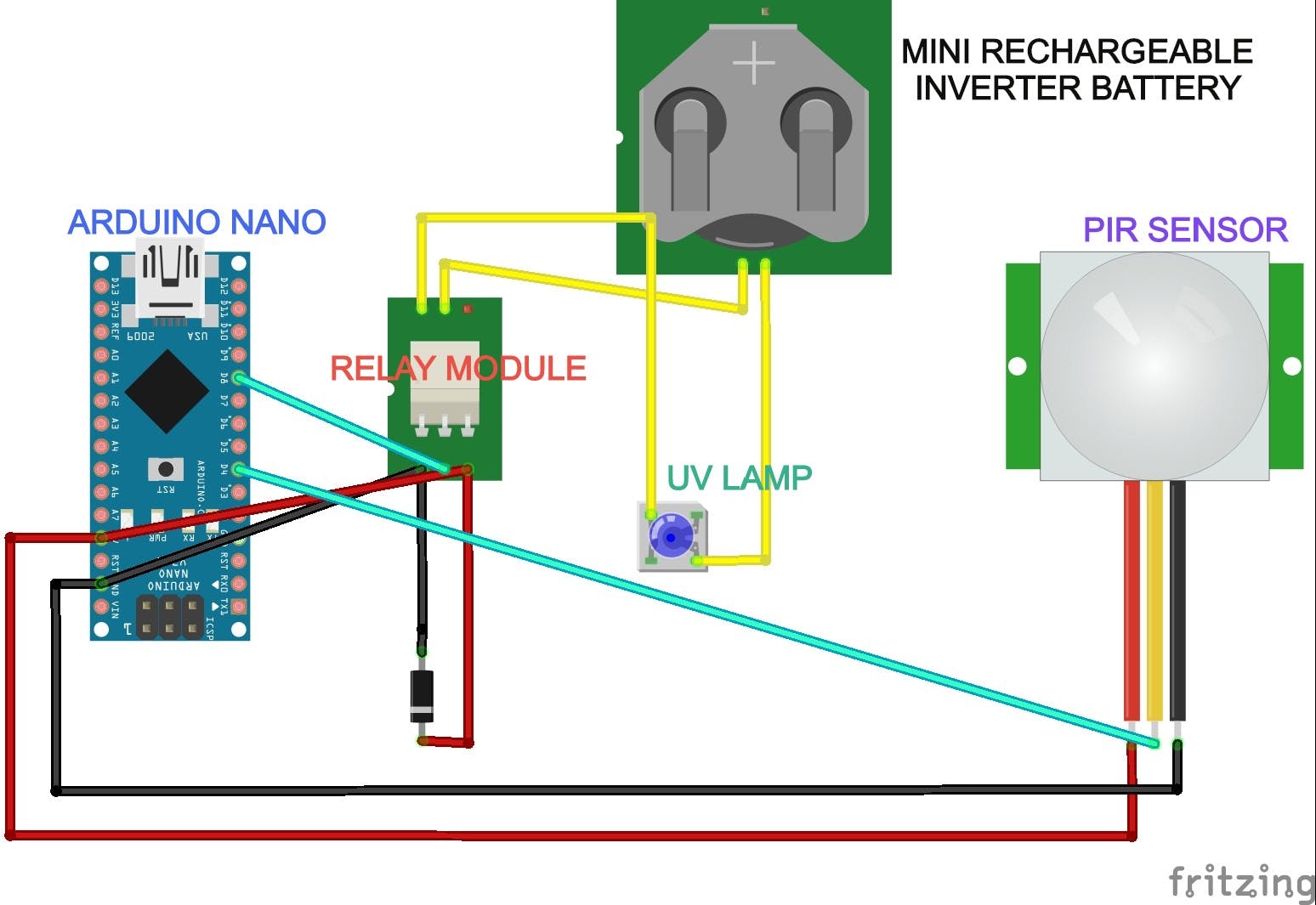
我们正在使用 PIR 传感器来检测人的存在。
PIR 传感器在检测到人体存在时会关闭紫外线灯,使人体免受紫外线辐射的危害,然后当没有任何人存在时,它会再次打开。
const int PIN_TO_SENSOR = 2; // the pin that OUTPUT pin of sensor is connected to
int pinStateCurrent = LOW; // current state of pin
int pinStatePrevious = LOW; // previous state of pin
void setup()
{ Serial.begin(9600); // initialize serial
// set arduino pin to input mode to read value from OUTPUT pin of sensor
pinMode(PIN_TO_SENSOR, INPUT);
}
void loop()
{
//Configure an Arduino's pin to the digital input mode
pinMode(PIN_TO_SENSOR, INPUT);
//Read state of sensor's OUTPUT pin
pinStateCurrent = digitalRead(PIN_TO_SENSOR);
//Detect motion start (pin's state change from HIGH to LOW)
pinStatePrevious = pinStateCurrent; // store old state
pinStateCurrent = digitalRead(PIN_TO_SENSOR); // read new state
// pin state change: HIGH -> LOW
if (pinStatePrevious == HIGH && pinStateCurrent == LOW)
{
Serial.println("Motion detected!");
// we can place an alarm to warn human to come near it
}
else
// pin state change: LOW -> HIGH
if (pinStatePrevious == LOW && pinStateCurrent == HIGH)
{
Serial.println("Motion stopped!");
// alarm will stop as human presence is not detected
}
}
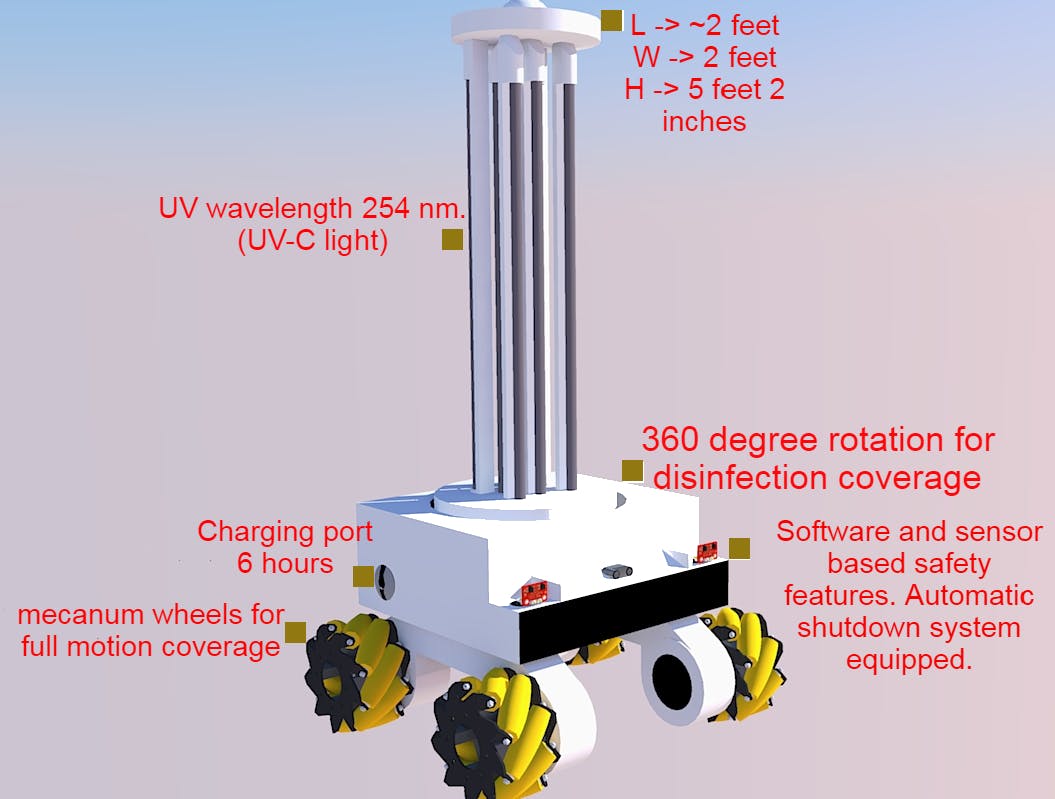
设计规范:-
物理尺寸(宽 x 长 x 高):- 2 英尺。X 2.22 英尺。X 5.2 英尺
3D设计和我们提供的CAD文件(Accessible agile design)
通过标准浴室隔间门安装,可根据需要的房间修改设计。
材质:-保护 UV 灯免受碰撞的玻璃由聚碳酸酯制成,其强度足以抑制任何外力,并可在窗户关闭时吸收辐射。
安全 - 带运动感应的灯关闭:- 25nJ/cm^2紫外线灯的波长为 256 nm,低于 TLV 水平,对人体安全。
版本 1:- 在灯顶上,有一个 PIR 传感器,人在时会关闭灯。版本 2:- 在此,电机和齿轮机构将运行,人在时会关闭灯周围的玻璃然后关闭灯以防止对人体造成任何危害
保护人员和单位的安全/有效方法
软件:-我们为用户提供了 3 种类型的软件:- 离线由用户远程控制 通过 Web 应用程序在线控制 通过使用Remoteme.org云服务的 Web 应用程序自定义控制
我们提供了 3 种类型的软件。UV 机器人的硬件可以使用并完全支持其中任何一个。
控制:-它是远程控制和半自主功能
我们提供了远程控制机器人的轮子,UVD 机器人的其他功能将自主运行。所以它是一个半自主机器人。
成本:- ≤ $5,000
以美元计算的总成本和价格可以进一步降低
较低的成本允许更广泛的受众购买产品。
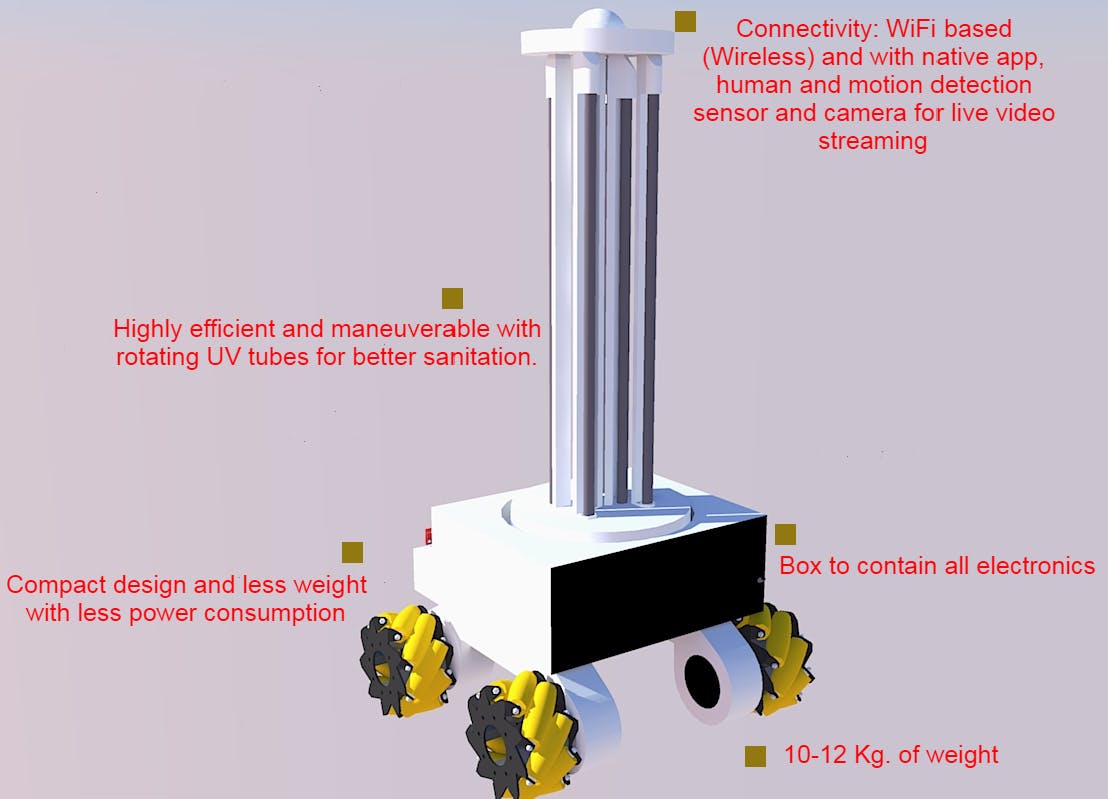
重量:- ≤ 10Kg,轻型。
电源:- 4 X 12V 3300mAh 3S LiPo 电池 1 X 迷你可充电逆变器电池
运行一个用于电机驱动器的 12V 3300mAh 3S LiPo 主电池,另一个用于微控制器、传感器和其他硬件设备的 3300mAh 3S LiPo 电池和一个用于 UV 灯的迷你可充电逆变器电池。
操作日志:-由于我们使用树莓派作为中央硬件,我们通过网络应用程序操作机器人并使用云服务,用户可以使用手机和移动时钟的 GPS 跟踪时间和位置。
紫外线灯:-杀菌紫外线灯 30W,长度 3 英尺,管灯直径 T8(1 英寸),103 V,0.44 A
发出 253.4 nm 的 UV-C 辐射,非常适合杀死病毒、细菌、霉菌、沙门氏菌等。它的生命周期为 8000 小时。
我们还在下面附上了一份包含材料清单的pdf文件。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



