
资料下载


具有HTTP Rest通信的机器人(Pytobot)
王燕
分享资料个
描述
机器人!
我制作了一个 DIY 机器人,其中包含机器人应该需要的所有安全功能。
主要特点:
- 电池安全
- 使用热点启动
- SSID 和 Passwd 印在 OLED 上
- 相机流
- 设置控制机器人的 API 的基本教程
所有代码和文档都在 GitHub 和Gitbook上。
如需更多信息,请访问www.pytobot.com 。
更新将在网站和 Github 以及 Gitbook 上的文档上发布。
该项目正在进行中。订阅以获取最新信息!
如有问题,请发表评论。
Pytobot的所有信息:
Pytobot 的小介绍:
机器人
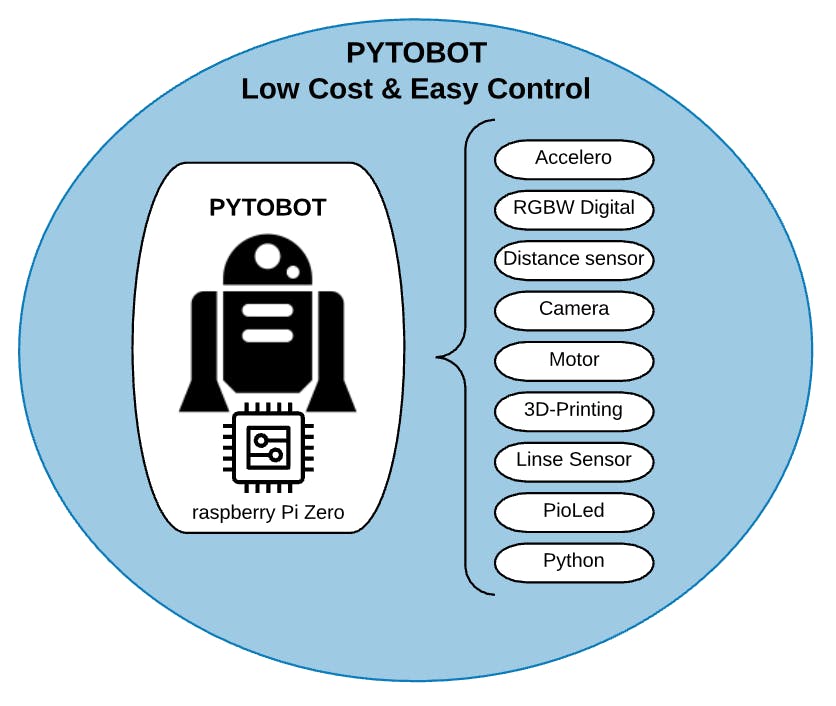
Pytobot是一款3D 打印的低成本 DIY 漫游车,它将带您一步步进入物联网世界。它将电子、3D 建模和物联网结合在一起,为孩子们量身定制了一个项目。
对于初学者来说,编程可能会让人不知所措。Pytobot 使步骤更容易,使儿童更容易编程。借助控制机器人的完整REST 界面,您将能够以多种方式控制不同级别的编程。
通讯与控制
Pytobot 建立在REST 接口和 JSON 通信上,由连接到Raspberry Pi网络的受控任何框架和程序控制。
JSON 是一种开放标准的文件格式,它使用人类可读的ext 来传输数据对象
RESTful API
REST 接口用于从前端(控制器)到后端(Pytobot)进行通信。RESTful API 是一种应用程序接口 (API),它使用HTTP 请求通过网络进行通信。
网络
为了通过网络控制机器人,树莓派将作为路由器和接入点。通过在与机器人相同的网络中访问,REST 通信处于活动状态,并建立了从控制器到后端的连接。
要连接网络,SSID SSID和密码将打印在机器人的OLED屏幕上。连接到热点后,将弹出一个浏览器并显示项目的功能。
更多信息请访问www.docs.pytobot.com
开始:
以下教程将为您提供 Pytobot 的所有默认功能:
你需要什么:
https://docs.pytobot.com/hardware/electronic
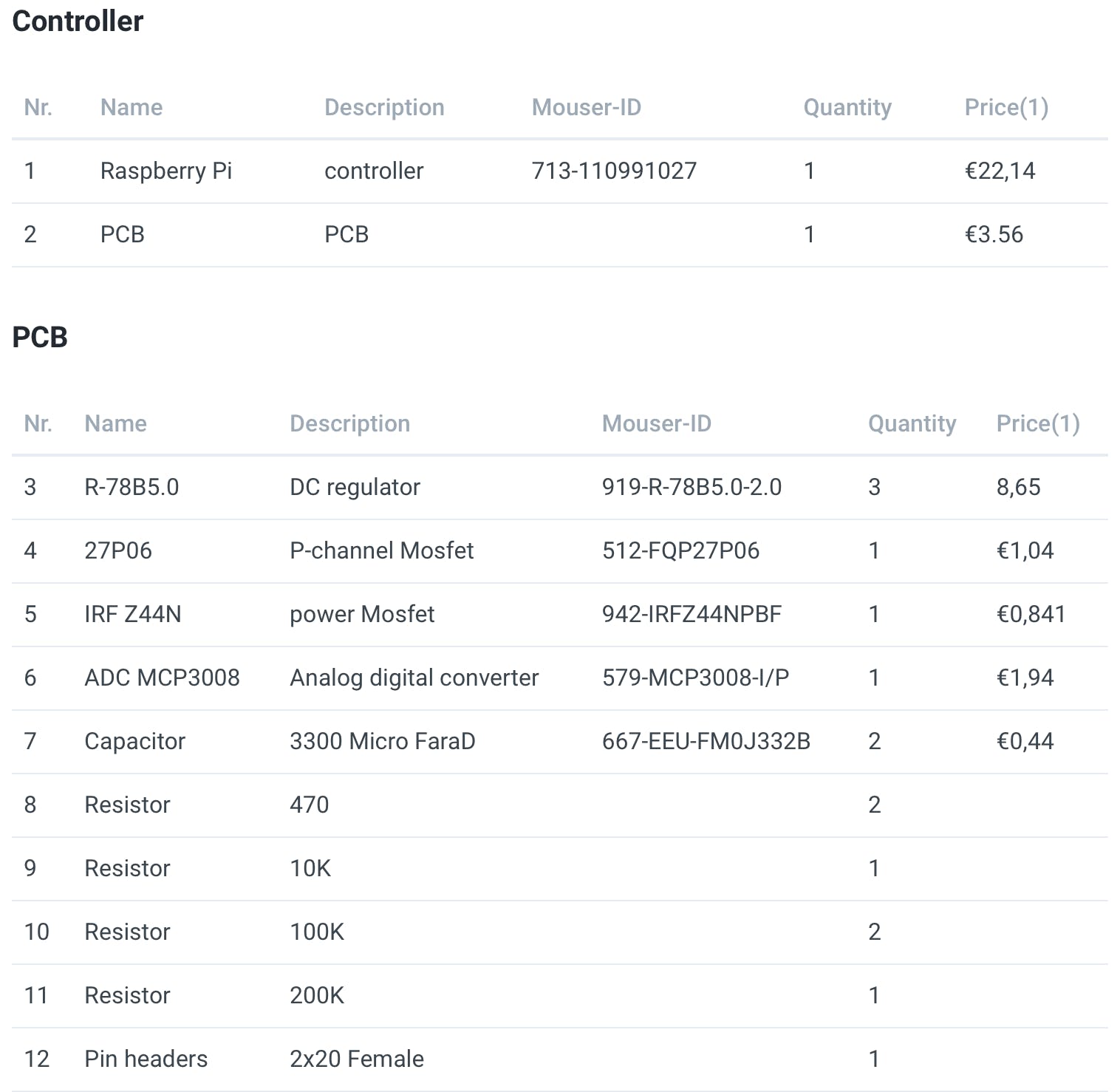
硬件的最低实现是:
- OLED
- 马达
- H桥
- 转变
最低总价(从 Mouser 订购)为95 欧元。
*不带电池和 3D 打印
软件
用Etcher 刷写SD 卡上的图像。
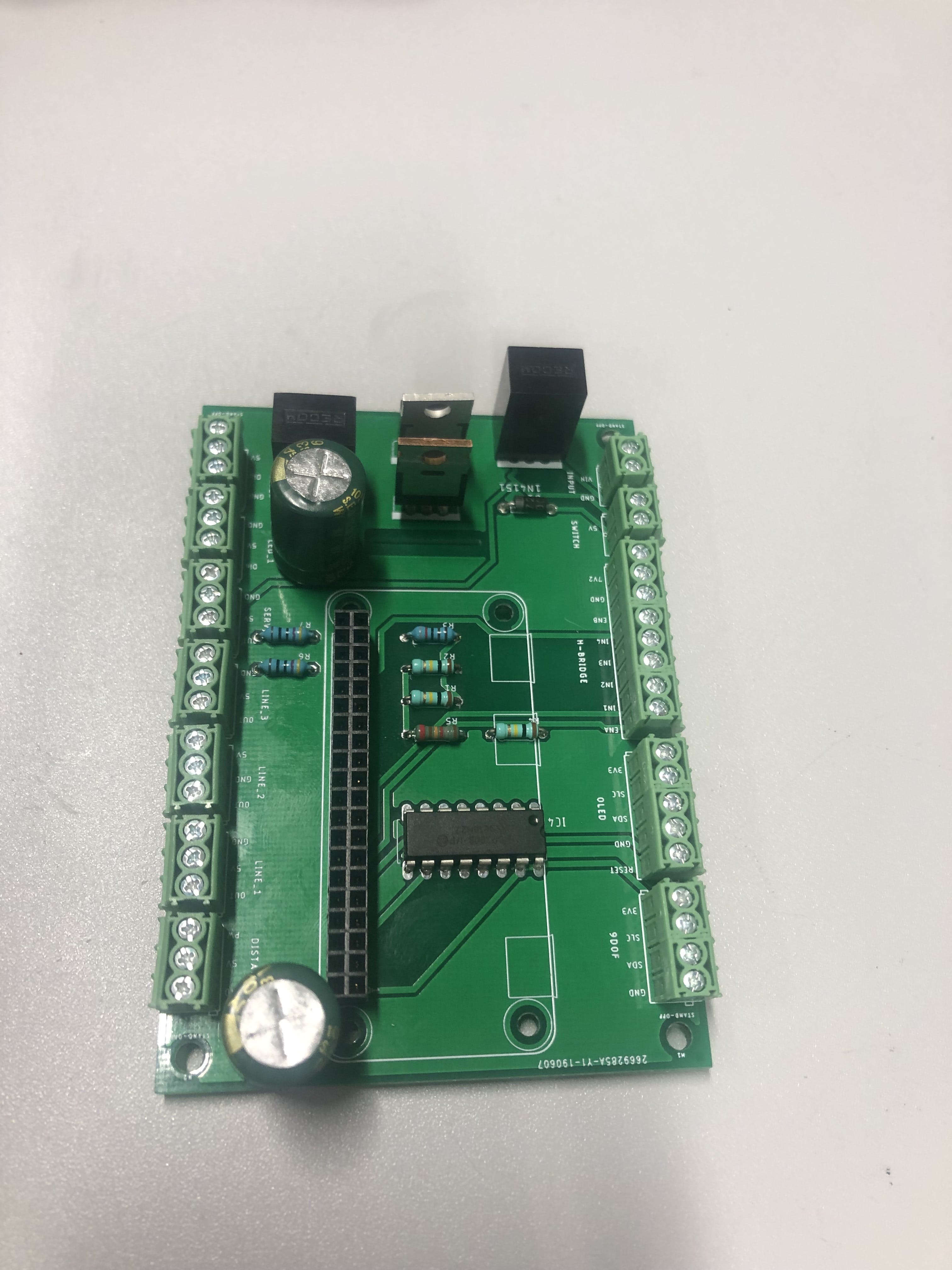
组装
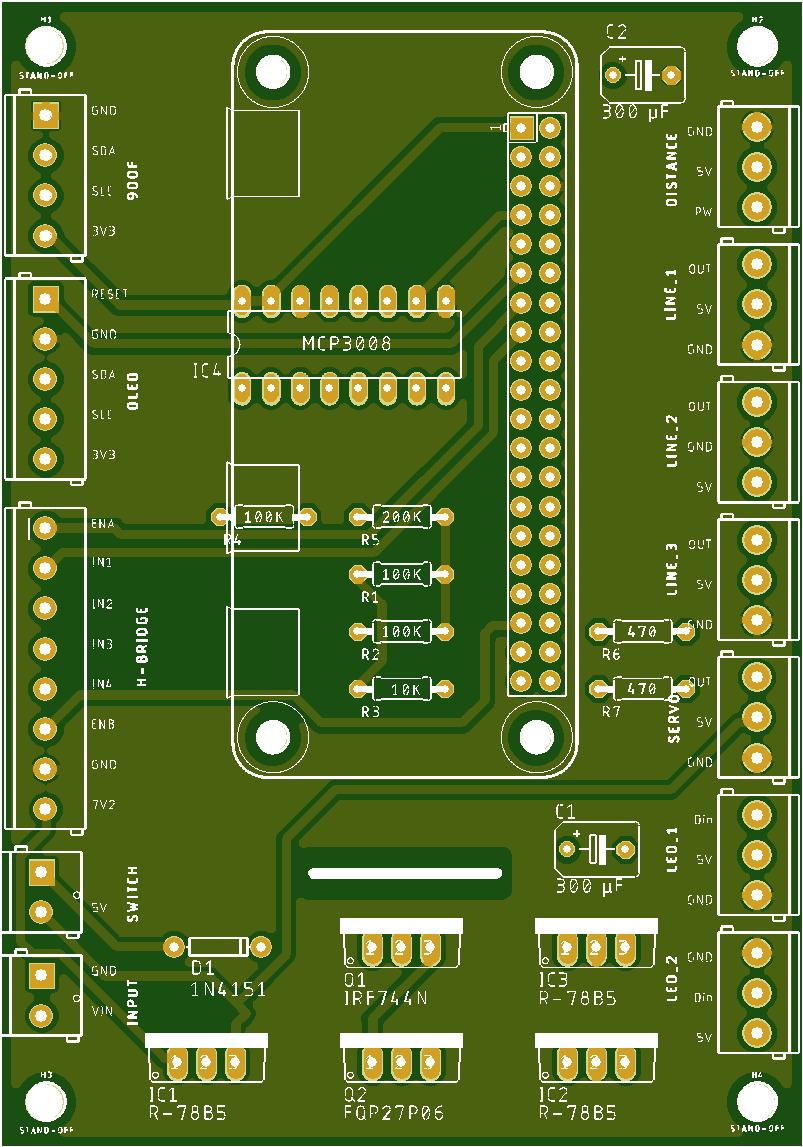
将元件焊接到 PCB 上。
您可以从https://jlcpcb.com获得非常便宜的 PCB
连接 PCB 上的 Raspberry Pi 并连接所有硬件线。
联系
通过开启机器人启动机器人槽。
Pytobot 需要 55 秒才能启动。
之后,SSID 和 PASSWD 将在屏幕上打印出来。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





