
资料下载


UIUC SE423 LiDAR机器人最终项目
南风一号
分享资料个
描述
本项目使用的板子
绿色 PCB 由伊利诺伊大学厄巴纳香槟分校的 Dan Block 设计和提供。
使用的红板是 Ti LaunchPad F28379D。
使用的技能
编码(使用C语言,调试,CodeComposerStudio,使用中断服务程序和串行打印值)
SPI 传输(陀螺仪读数和磁力计读数)
电机使用(光学编码器、占空比)
阅读(数据表、寄存器图、论文、文章)
介绍
Project Goal
该项目的目标是从原点开始,循环往复。随着时间的增加,圆的直径会增加。当有障碍物时,机器人会停下并打印出位置、位姿(phi角)和罗盘角(通过MPU)。该检测是通过使用 LiDAR 获得的。
对于障碍物跟随,也就是发现障碍物之后,它使用激光雷达来获取跟随左侧障碍物所需的距离。
Project Motivation
我做这个项目的原因是为了更好地了解我在 Launchpad 上的观点,并帮助我使用 serialRXD 获得有关 LiDAR 的更多信息。
校准磁力计
为了在 MPU-9250 上使用磁力计,我们需要进行校准。可以通过抓取 x、y 和 z 方向的最小值和最大值来完成校准。另外,请注意,由于环境的原因,这些偏移量可能不会每次都保持不变(许多事情会干扰室内的阅读)。
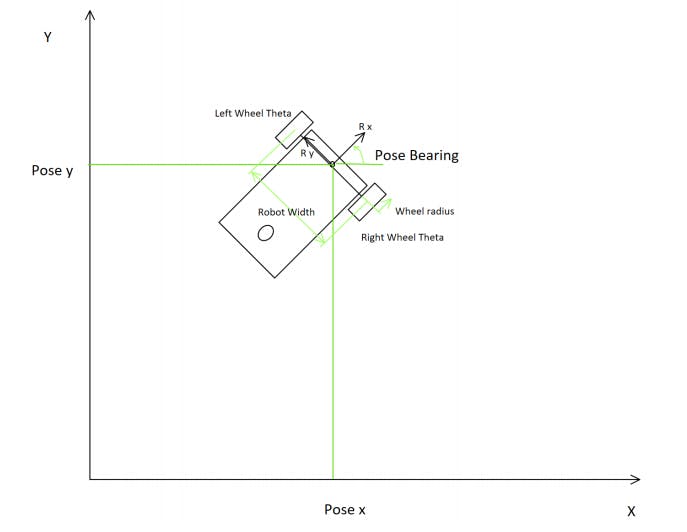
确定 Phi
phi 角由车轮角度之间的差异决定。 来自 MathWorks 的参考资料
参考实验室手册
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






