
资料下载


使用Blynk手机应用程序提供的超声波传感器和操纵杆
哈哈哈
分享资料个
描述
项目概况
该项目的目标是使用 Blynk 手机应用程序提供的超声波传感器和操纵杆,仅使用超声波传感器和 IMU 的反馈来引导 Quade 通过简单的障碍路线。Wifi 将用于将数据从 msp432 传输到计算机,在那里可以对其进行解析并显示给操作员。
项目范围
为了构建并运行该项目,我们将使用 MSP432 作为主要逻辑来中继和操作输入和输出。我们将附加多个模块,一个用于跟踪四足动物前方障碍物的超声波传感器,一个用于 360 度全方位视野的附加伺服器,一个通过 Arduino Uno 连接的 Wifi 模块,以及 Blynk 应用程序中的一个操纵杆。通过所有模块协同工作,Quade 将为用户提供其周围环境的“视图”,并且 Blynk 应用程序将用于导航 Quade 通过障碍物。这些模块是对基本 Quade 构建的补充,该构建包括多个伺服系统来控制其运动。中断用于检测物体是否在与机器人的碰撞路径中,从而导致控制 Quade 腿的伺服系统交替动作。
PCA9685 将用于控制单个伺服系统,该伺服系统本身由 MSP 配置。除了允许超声波传感器旋转的八腿伺服系统之外,还添加了一个额外的伺服系统。这种组合使传感器移动性增加了传感器的实用性,以查看更多周围环境并将有关环境的附加信息传输到控制器。
由于我们想无线控制机器人,我们将有一个 wifi 模块(ESP8266)。此外,Blynk 手机应用程序提供的操纵杆通过 Wifi 模块与 MSP 进行无线通信。超声波传感器数据通过无线方式将数据从 MSP 发送到控制器的计算机,从而实现有效的数据解析和显示。使用 Blynk 库简化了必要的工作,因为它已经包含一个应用程序接口。Wifi 模块使用 UART 通信协议进行编程以传输数据。
IMU 从 Quade 收集所有实时数据,然后 MSP 将其中继到控制器的计算机。I2C 协议用于在不同外设之间进行通信。操纵杆发送相对于 Quade 当前位置的相对值,从 Blynk 应用程序无线通信到 wifi 模块。
外围讨论
SG92R伺服电机
SG92 是一款经济型电机,能够为其尺寸提供大量扭矩。它重 9 克,仅 4 美元左右,是一款可以批量购买以满足多种需求的电机。它适用于低电压要求,并提供足够的扭矩来抬起我们的四足机器人。
Turnigy 纳米技术锂聚合物电池
这种 Lipoly 电池是一种便宜但性能好的来源。它的容量为 370 mAh,由 2 节电池组成,可提供高达 7.4 伏的电压。它的重量最小,只有 27 克。它具有 7.5 kW/kg 的高功率密度和良好的热控制。
超声波HC-SR04传感器
超声波 HC-SR04 传感器将帮助我们的四足机器人自行导航以避开任何障碍物。该传感器对我们来说是一个不错的选择,因为它的最大范围为 4 米。它的工作电压为 5 伏,符合我们可以从电池中提供的电量。有关 ECEN2440 类套件中包含的传感器的比较,请参见下表。
Wifi 模块 ESP8266 (ESP-01)
这款 wifi moule 体积小,易于连接到其他设备并使用 UART 运行。主要优点之一是该模块有一个名为 Blynk 的库,该库具有自己的应用程序功能,因此它使我们更容易处理和收集无线信息。我们只需要专注于编码模块将要发送的信息。
贸易研究
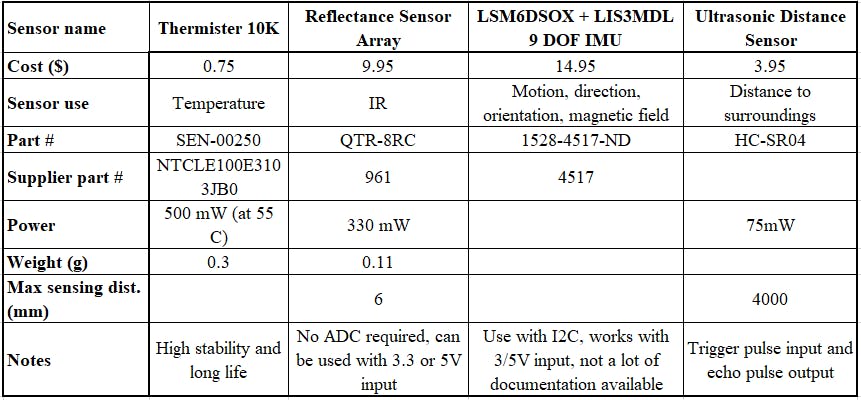
传感器讨论
该项目的目标是远程控制 Quade,而无需实际查看其周围环境。
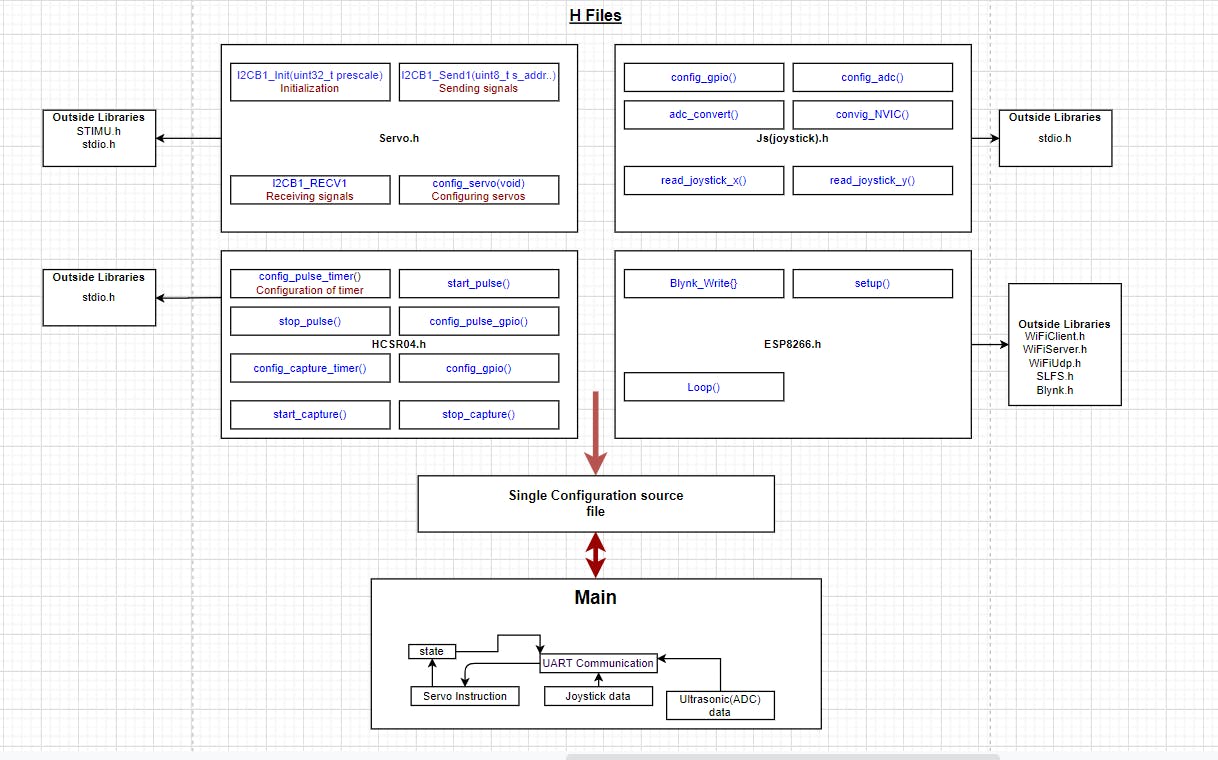
软件图
引文和链接附录
阿达水果。“PCA9685 16 通道伺服驱动器” adafruit.com
CircuitDigest “连接伺服电机与 MSP430G2” circuitdigest.com
Pololu “比较 1 类产品” pololu.com
Sparkfun Electronics “ESP8266ModuleV1-1095236.pdf” mouser.com
伺服信息
HC-SR04 超声波传感器数据表
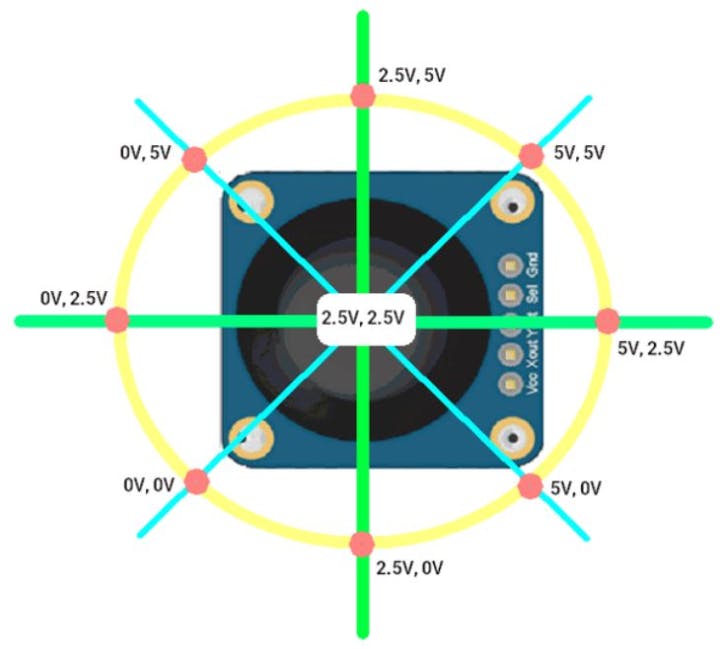
ADC 设置
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




