
资料下载


树莓派运动跟踪枪炮塔
刘桂英
分享资料个
描述
我们有许多宝贵的财产需要保护,但我们不能同时无处不在。运动检测使用 openCV 和计算机视觉来跟踪摄像机前的移动目标。

测量圆形 MDF 块的中心并用铅笔标记。一个电机将安装在一个圆圈的中心,一个 3D 打印的法兰轴环将安装在另一个圆圈的中心。
对于电机安装孔,取一张纸并将其放在电机安装面上,用电机轴刺穿纸。使用钢笔在纸上为每个螺纹安装孔戳孔。然后可以将这张纸用作模板来定位 MDF 圆上的孔。将此模板居中在一个 MDF 圆上,并使用 1/8" 钻头钻四个安装孔。使用 5/8" 钻头钻出中心孔。

使用四个 M3 机器螺钉和四个垫圈,将其中一个步进电机安装到 MDF 圈上,然后用六角扳手将其拧紧。使用另一个 MDF 圆,将 3D 打印的带环法兰居中于板的中心,并使用铅笔标记三个安装螺钉孔中的每一个的钻孔位置。使用手钻或螺丝刀,使用三个 #8 埋头孔半英寸长螺钉将法兰环连接到板上。然后将电机轴的槽口与法兰环上的槽口对齐,然后将其压入。

给枪接线
在进行下一步之前,请准备好气枪或 nerf 枪,以便在建造时准备好安装到炮塔上。准备方法取决于您的气枪或 nerf 枪型号,但我们发现有两种方法可以将电线连接到我们的枪:
选项1:
第一个,但也许更困难的选择是拆开你的枪,找到扣动扳机时关闭的开关。从这个开关上拆下电线,将它们直接焊接到你自己更长的电源线和地线上,然后将它们从枪中送出。然后重新组装枪。由您刚刚断开的触发器驱动的物理开关稍后将被 Raspberry Pi 控制的继电器取代。虽然我们使用了这个选项,但我们发现正确地重新组装我们的枪非常困难。
选项 2:
第二种选择是让你的枪完好无损,但将电源线和地线焊接到电池的电触点上。然后,您必须使用胶带或其他方式按住扳机,以关闭内部开关。

建造炮塔腿
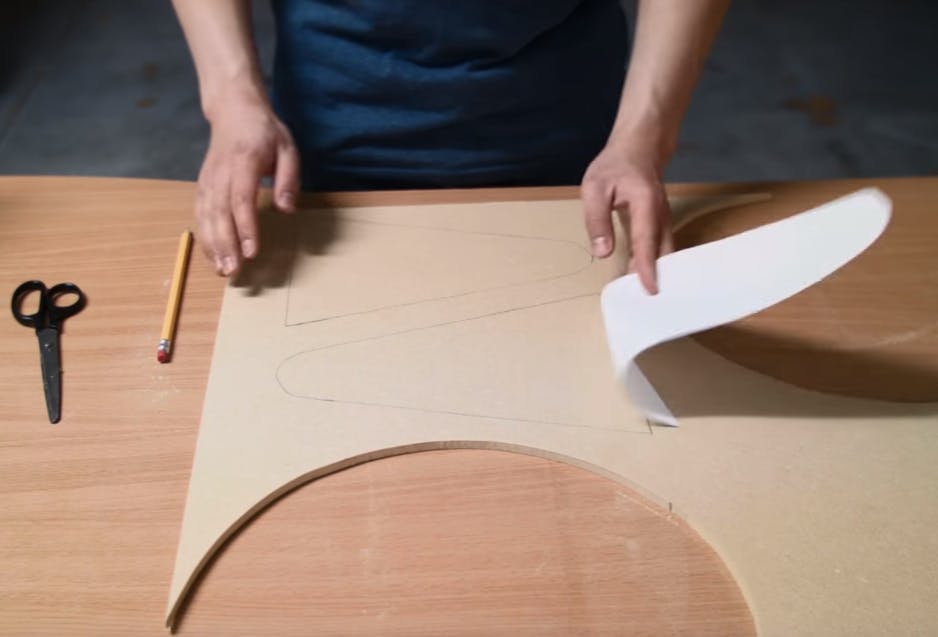
接下来,我们准备制作用于固定枪的炮塔腿。腿的形状取决于你的枪,但我们使用了大约 7.9 英寸高的腿,底座宽 6.3 英寸,顶部宽约 2 英寸。
在一张纸上画出你想要的腿形,然后用剪刀剪下来。然后,您可以使用此纸作为模板在您的 MDF 板上进行跟踪。使用手锯,或者最好是电动拼图,将腿从 MDF 板上切下。
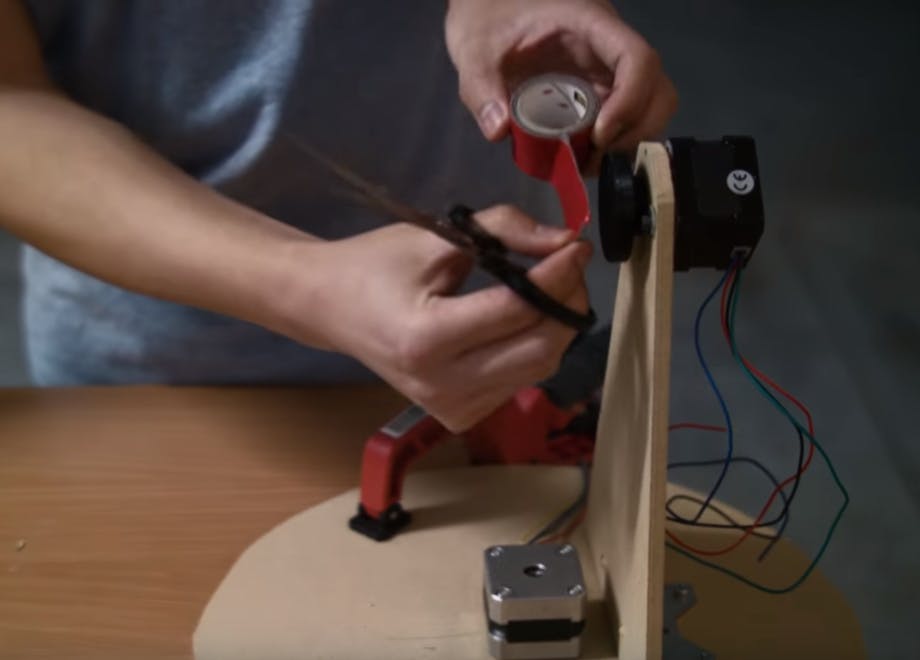
在其中一条腿上,钻一个 5/8 英寸的孔,让第二个电机的轴穿过,以四个 1/8 英寸的孔为中心,用于安装第二个电机,就像您在其中一个圆形 MDF 板上所做的那样。另一条腿将有一个半英寸的孔,用于支撑 3D 打印的法兰轴旋转。
使用四个 M3 螺钉和垫圈将第二个电机安装到支腿上,四个 1/8" 孔以 5/8" 孔为中心。然后将第二个 3D 打印法兰环插入电机轴上。
现在拿起两个 90 度角的支架并将它们拧入每条腿的底部,如图所示,使用适合特定金属支架孔的任何螺钉。

组装炮塔
现在你必须弄清楚双腿之间的距离有多远。在所需的连接点测量枪的宽度。将 3D 打印的法兰轴放入另一条腿的 1/2" 孔中,然后将腿竖起来,将它们分开,使枪的宽度在两个法兰部分之间。然后您可以测量您的腿应该多远间隔,并在圆形MDF板上标记此间距。在圆形MDF板上标记后,将装有电机的腿拧到一侧。
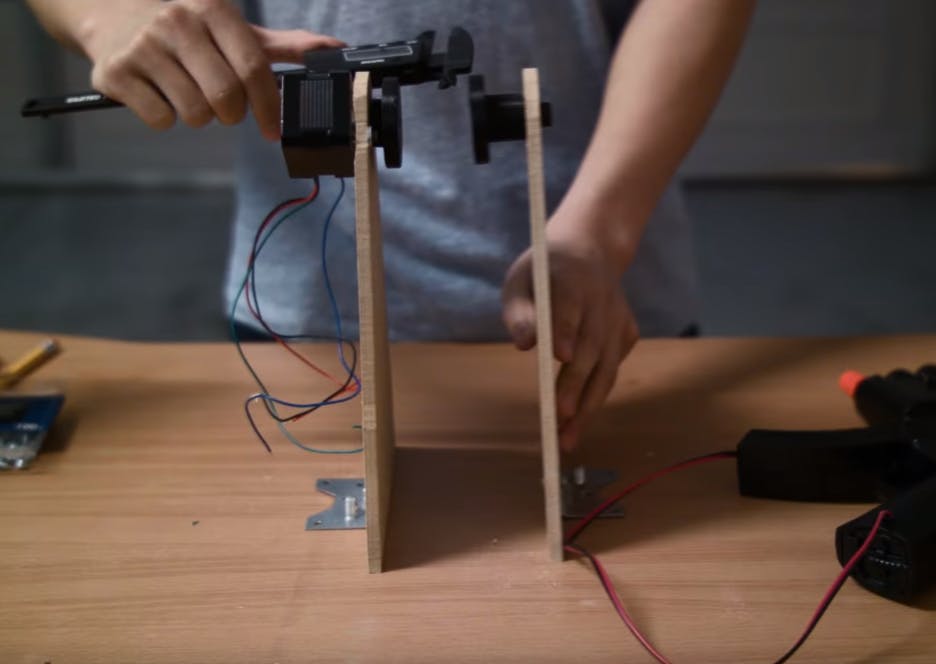
在将另一条腿拧入之前,使用一些粘性的双面户外安装胶带并将其放在法兰轴环和法兰轴的表面上。在朋友的帮助下,将枪放在法兰之间,并在使用手钻将腿拧入时将另一条腿固定到位。
电子产品
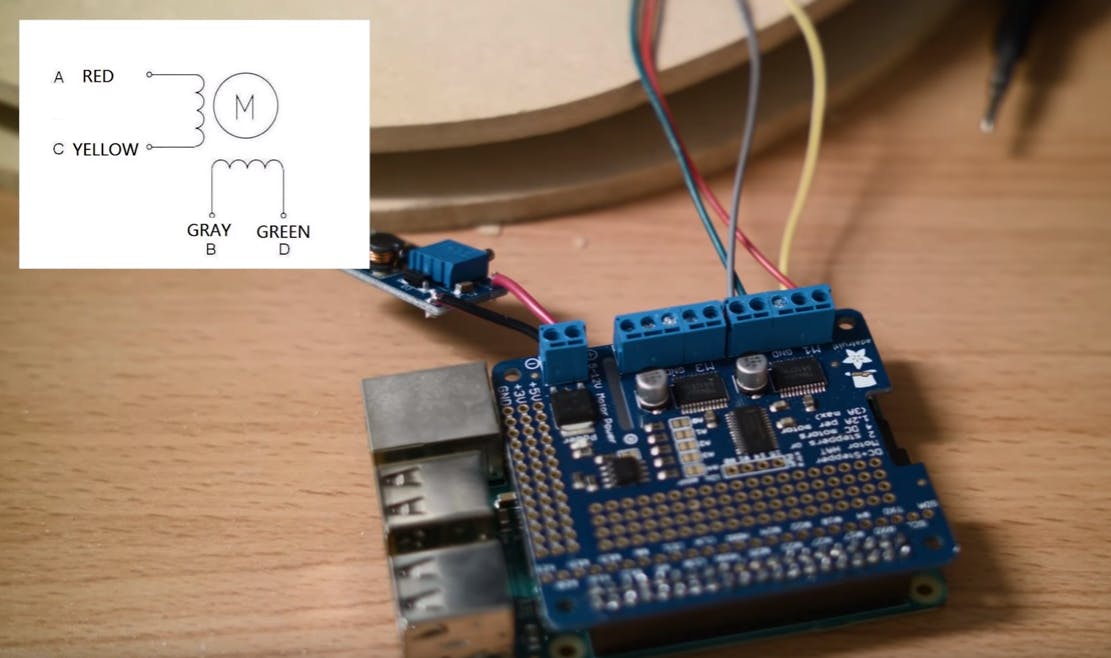
将步进电机帽插入 Raspberry Pi。将步进电机帽的电源输入连接到升压转换器的电源输出(如下图第一张左侧所示)。
电机帽上有两个步进电机端子。将转塔底座上的电机连接到端子 A(如下图第一张右侧所示)。将喷枪枢轴电机连接到另一个端子 B。
将这些电子设备以及便携式电池充电器放在炮塔的底座上。您可以使用微型 USB 电缆将 Raspberry Pi 和升压转换器连接到便携式电池充电器,以便稍后使用。
通过将继电器的电源和接地连接到步进电机帽的电源轨(下图第三张图中的红色和紫色线),将继电器连接到步进电机帽。然后将信号线连接到 Pi 上的 GPIO 引脚 22(下图第三张图中的橙色线)。将继电器的输出连接到喷枪上的电线。
电子产品差不多就是这样。插入的最后一件事是使用其 USB 电缆将网络摄像头连接到 Pi。网络摄像头的位置取决于所使用的模式:自主运动跟踪或交互模式。在运动跟踪模式下,将相机放在桌子上,使其静止,而枪会跟踪移动的目标。在手动模式下,您需要尝试将相机视野与枪的方向对齐,因此在这种情况下将网络摄像头指向枪管的瞄准线。这样,当您控制它并四处移动时,您将看到枪支所看到的一切。

。然后,您需要从 Adafruit GitHub 存储库安装用于控制步进电机帽的库。
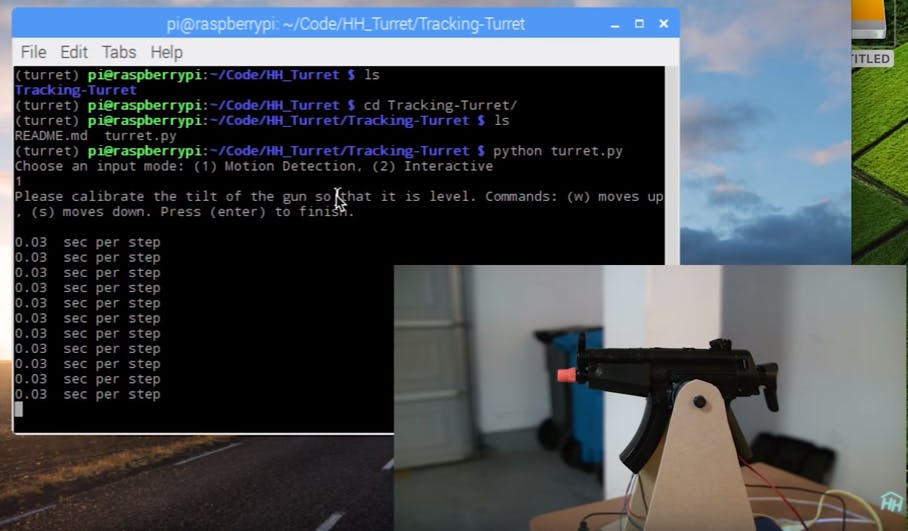
运动追踪模式校准
由于软件在启动时不知道枪的位置,因此您需要在打开时校准炮塔。python程序会提示你使用键盘调整炮塔的仰角和偏航角,并确认它是水平和居中的。
炮塔位置校准后,软件将校准相机的曝光水平,并选择参考图像进行运动检测。由于运动检测通过将后续图像与初始参考图像进行比较来进行更改,因此您需要确保在图像校准期间相机前方没有任何移动。
交互模式
在交互模式下无需校准。只需将相机与枪管对齐,然后使用键盘移动和发射炮塔。使用“a”和“d”键左右旋转,使用“w”和“s”键上下调整炮塔角度。按“Enter”开火。

防守!
恭喜!你现在有一个坚不可摧的防御来防御你的对手。但请记住,权力越大,责任越大。一路顺风!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




