
资料下载


Mobius E4DS Winner onem2m机器人开源
张玉珍
分享资料个
项目概况
E4DS WINNER机器人沿着红线奔跑。如果机器人在驾驶时检测到输入的图像中有人,机器人会将图像传输到 oneM2M Mobius 平台。管理员可以在 Mobius 上查看检测到的人物图像。

E4dS WINNER 机器人规格
- ROS 控制器:树莓派 4B
-OpenCRP(ROS 的开源控制模块)
-USB 1080p 摄像头,深度摄像头
-直流减速电机、激光雷达
-Raspberry Pi OS Buster(arm64)系统
-ROS Noetic Ninjemys 版本和工具,rosnodejs
项目配置
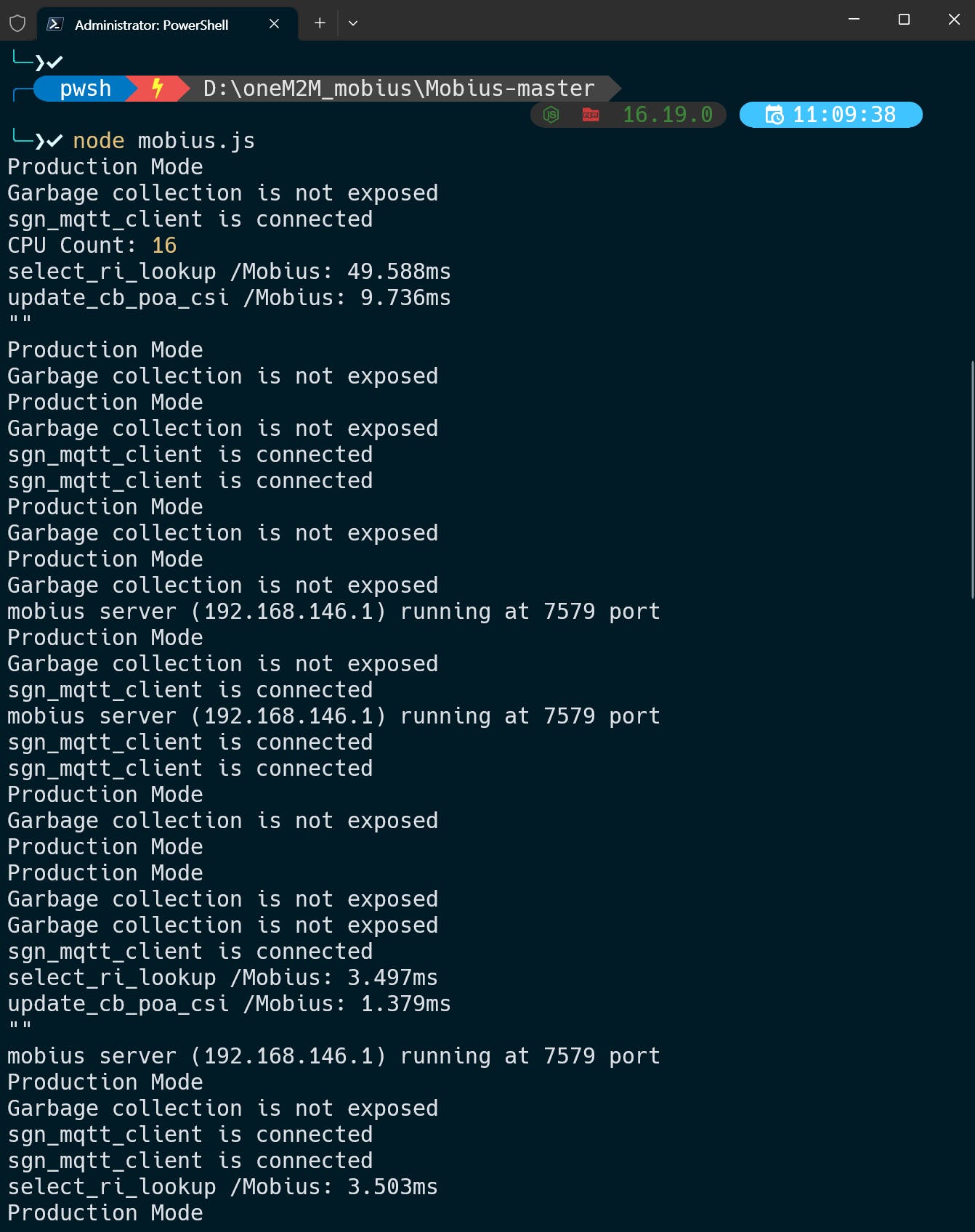
1. oneM2M Mobius 平台:Mobius 平台 PC (Windows 11)
2. E4DS WINNER机器人

3. ROS机器人上位机(VMware):
- Ubuntu18.04, ROS Noetic, ROS工具
- 监控 ROS 主题和事件
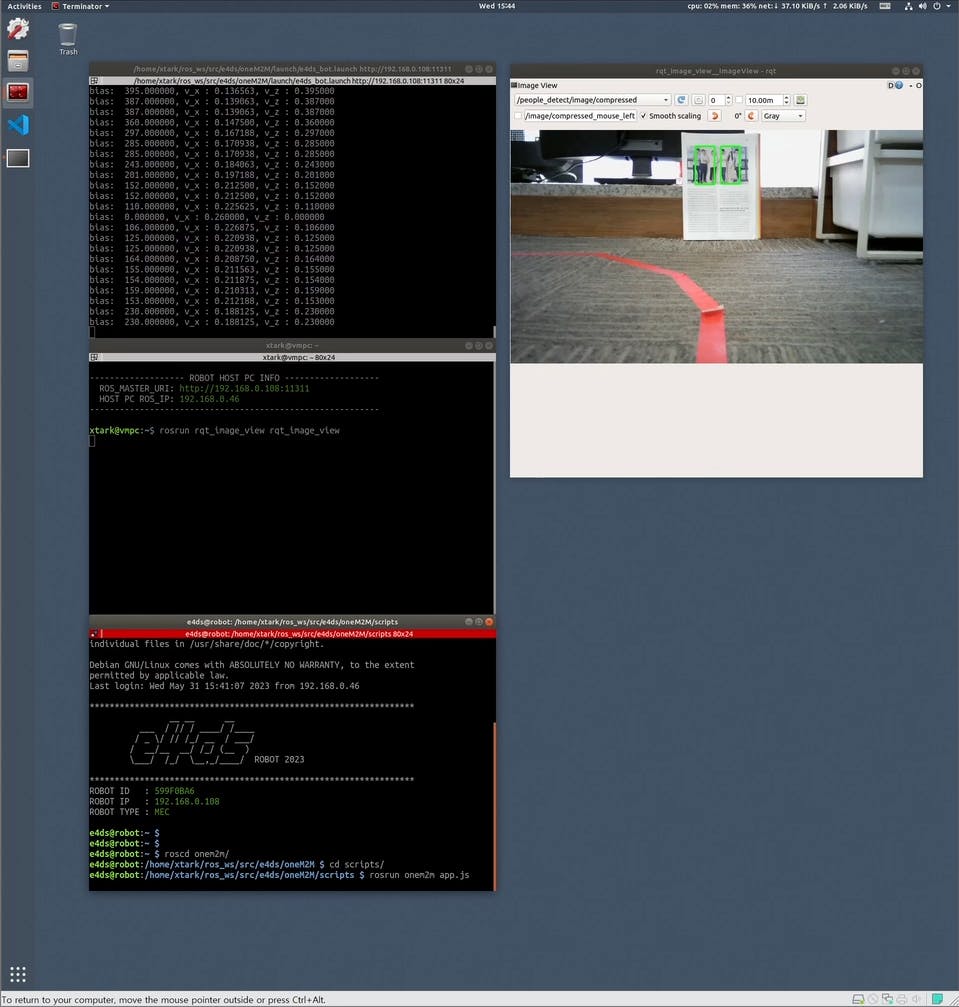
运行 ROS 节点和主题
这张幻灯片显示了 E4DS WINNER 机器人中正在运行的 ros 节点和主题。
使用来自相机的输入图像,people_detect 节点检测人物并发布绿色主题。
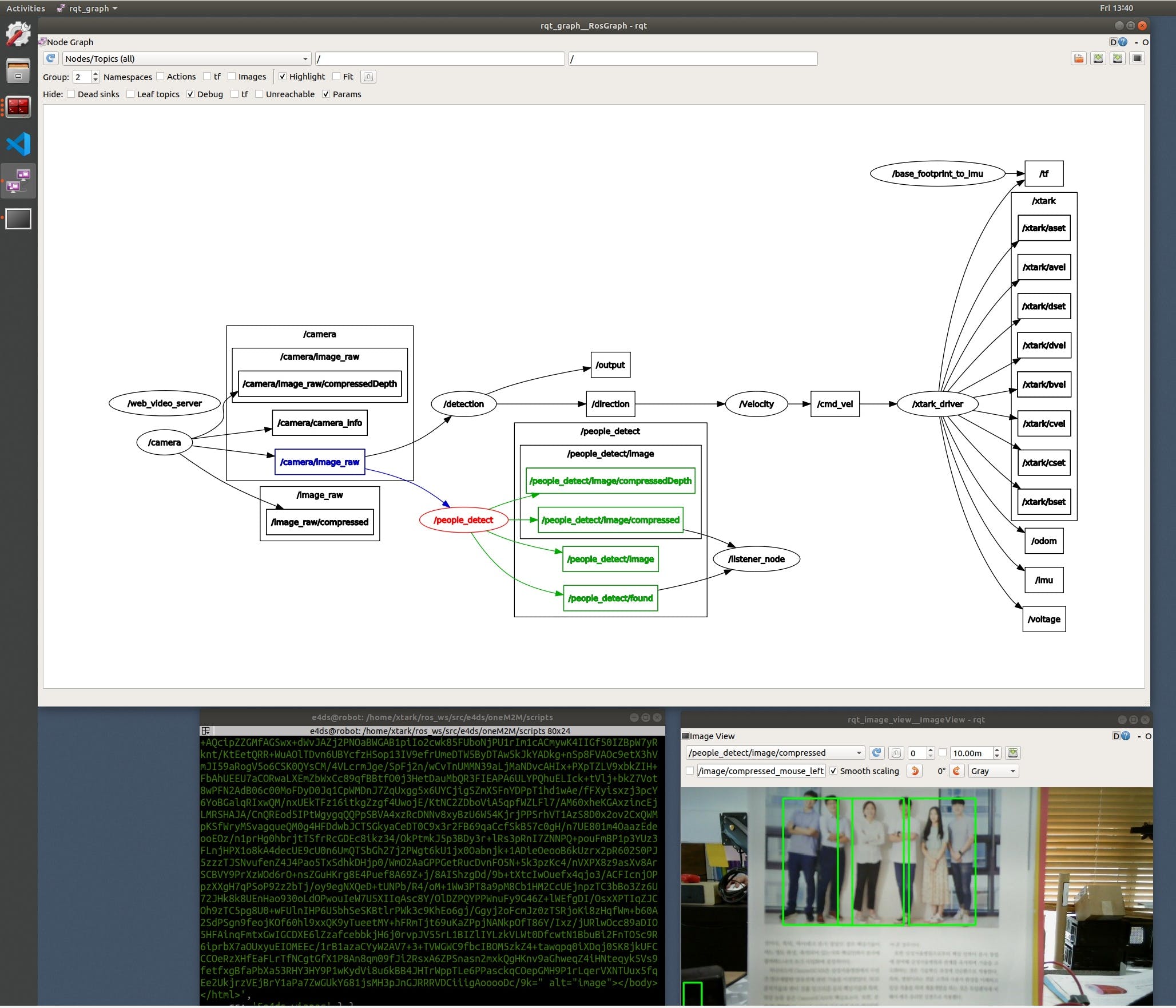
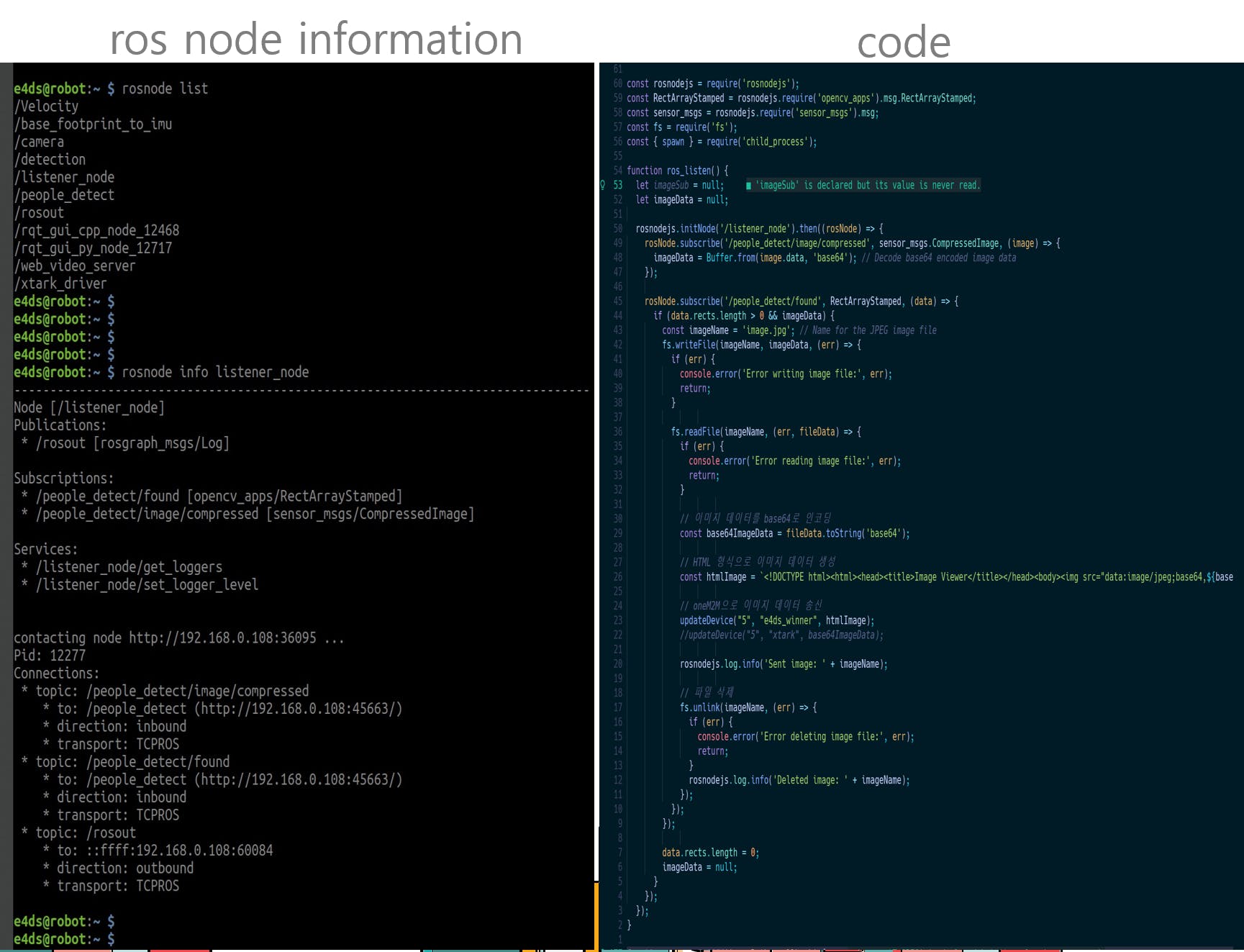
OneM2M listener_node
oneM2M listener_node 继续订阅 /people_detect/image/compressed 主题,当订阅 /people_detect/found 主题时,将图像传输到 Mobius 平台。
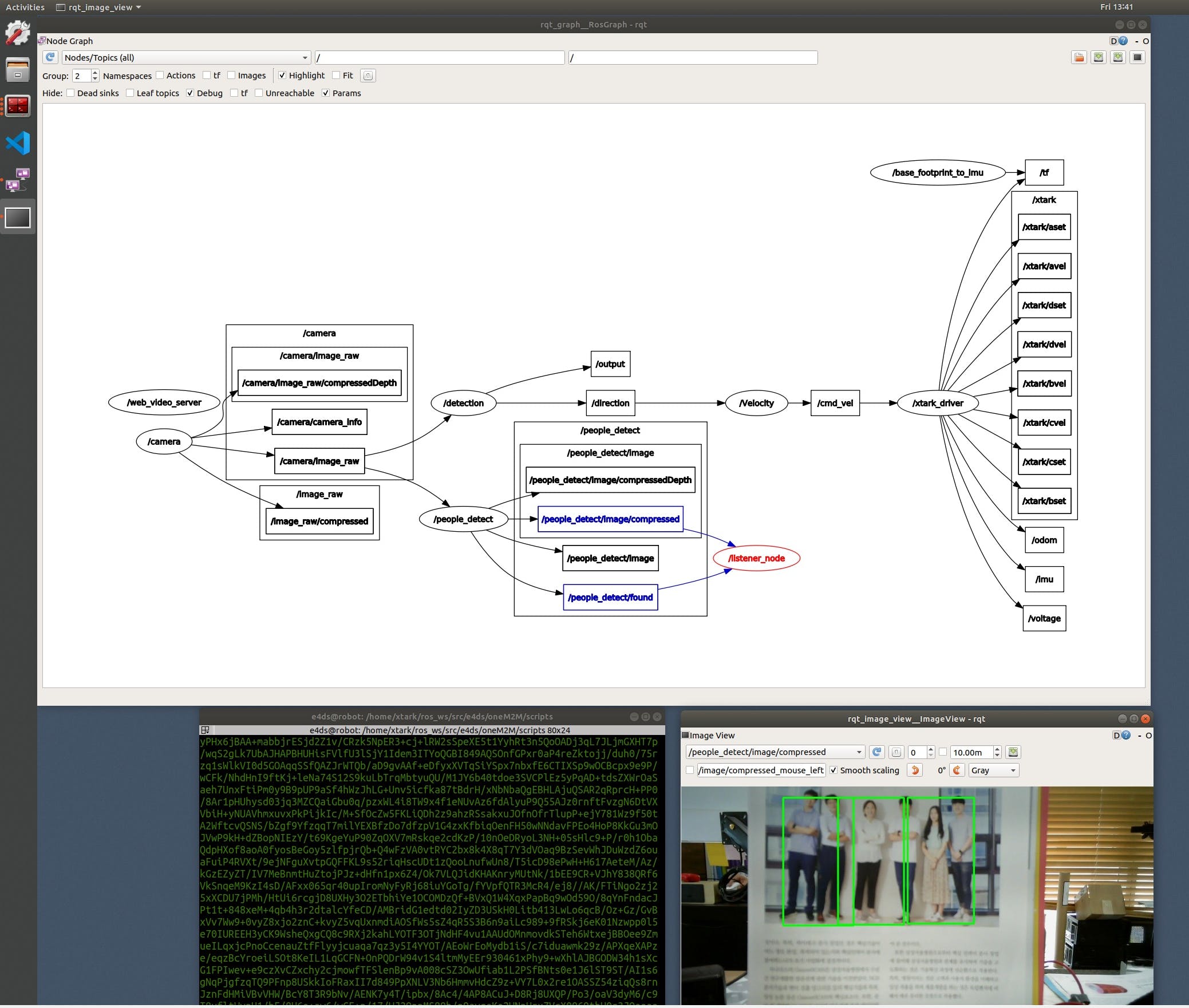
oneM2M listener_node 信息和代码。
listener_node 订阅 /people_detect/found 和 /people_detect/image/compressed。压缩后的Image数据以html格式传输。
将来的计划
我们计划改进收集和传输机器人内部电池状态、行驶距离、环境温度和湿度等各种信息的功能,并同时控制多个机器人。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





