
资料下载


×
纸板伴侣机器人开源分享
消耗积分:0 |
格式:zip |
大小:0.08 MB |
2022-11-07
分享资料个
描述
我经常感到孤独,所以我创造了这个纸板伴侣机器人。
它基于 Arduino MKR1010 WiFi,操作非常简单。
它也是从 Arduino 的官方 Instagram 帐户分享的!
很多人开始问我完整的草图和教程,所以我在这里!
教程
首先,我已经为机器人的身体切割了纸板,然后我连接了超声波传感器。
然后我用这个代码和这个电路将伺服设置在 90° 位置(抱歉,Tinkercad 上没有 MKR)
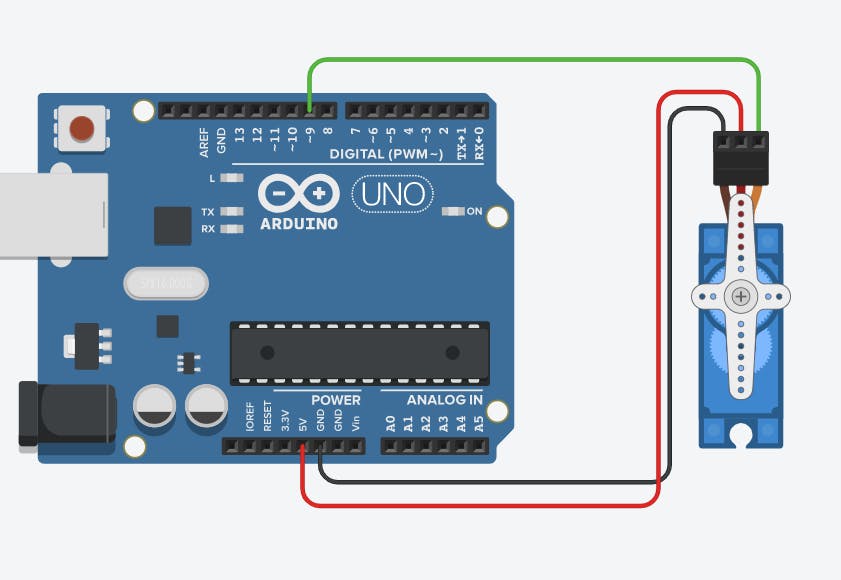
#include
在那之后,我把所有东西都放在了卡片上。我在这里附上一些照片,但要有创意!
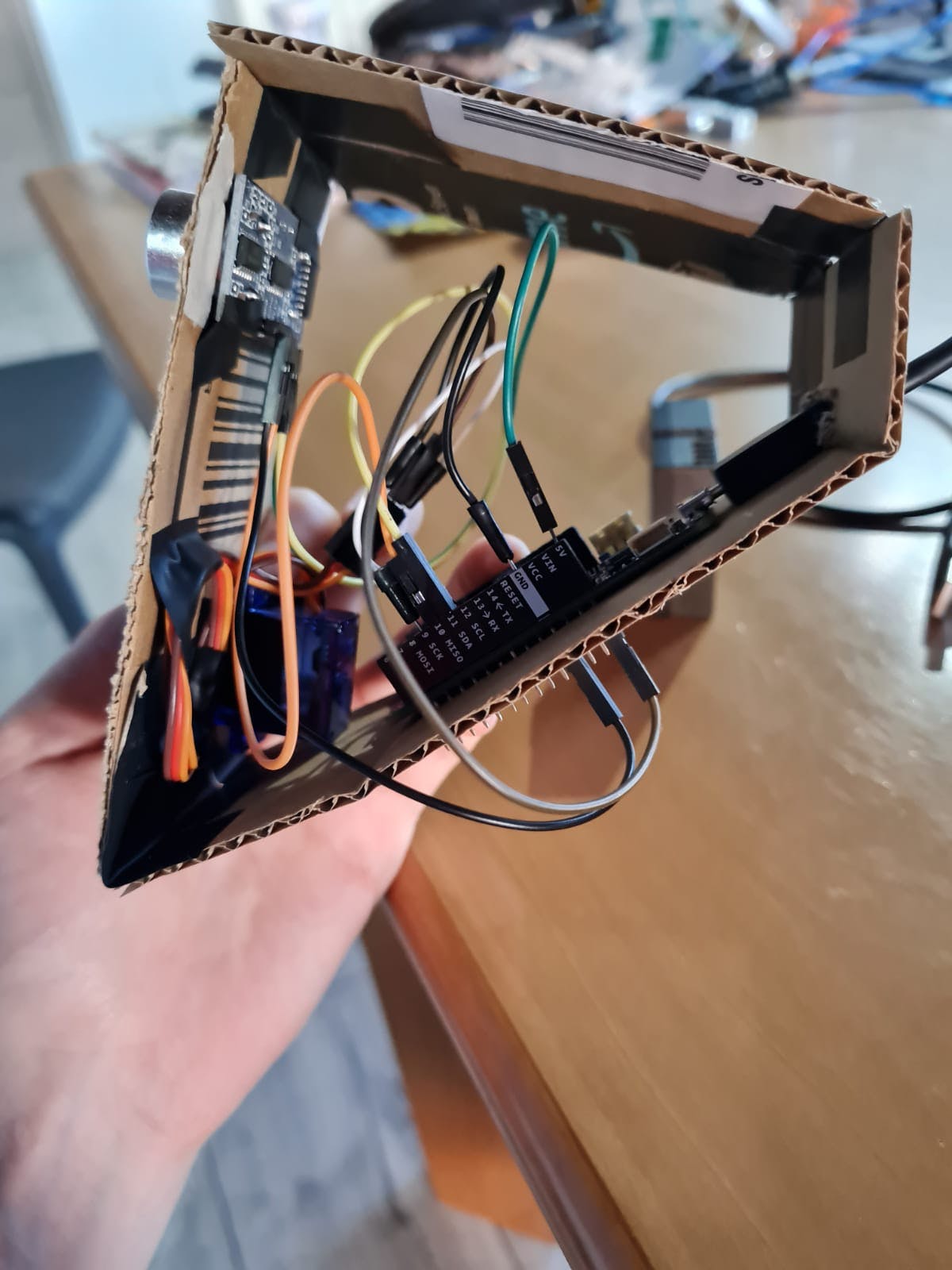
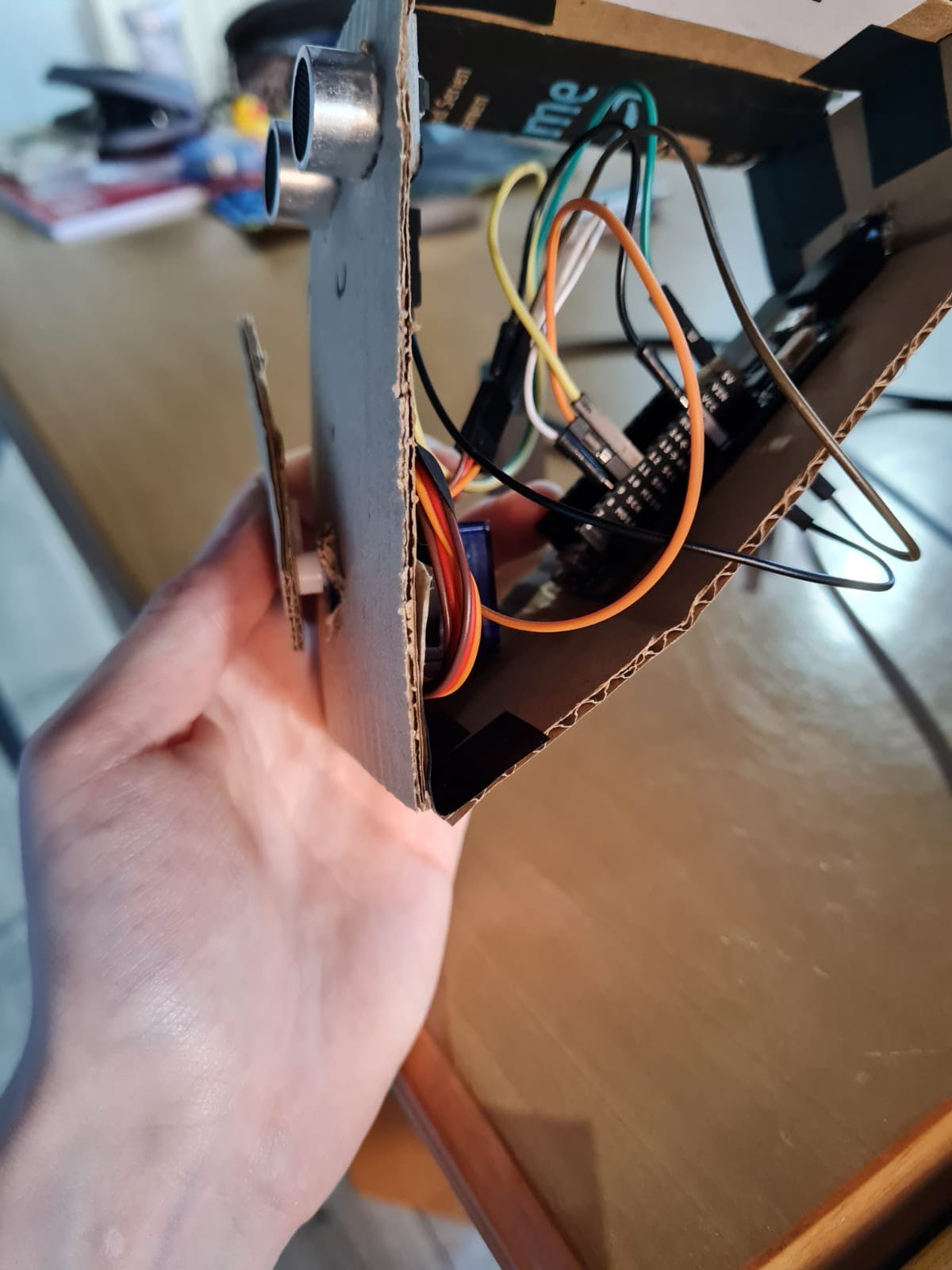
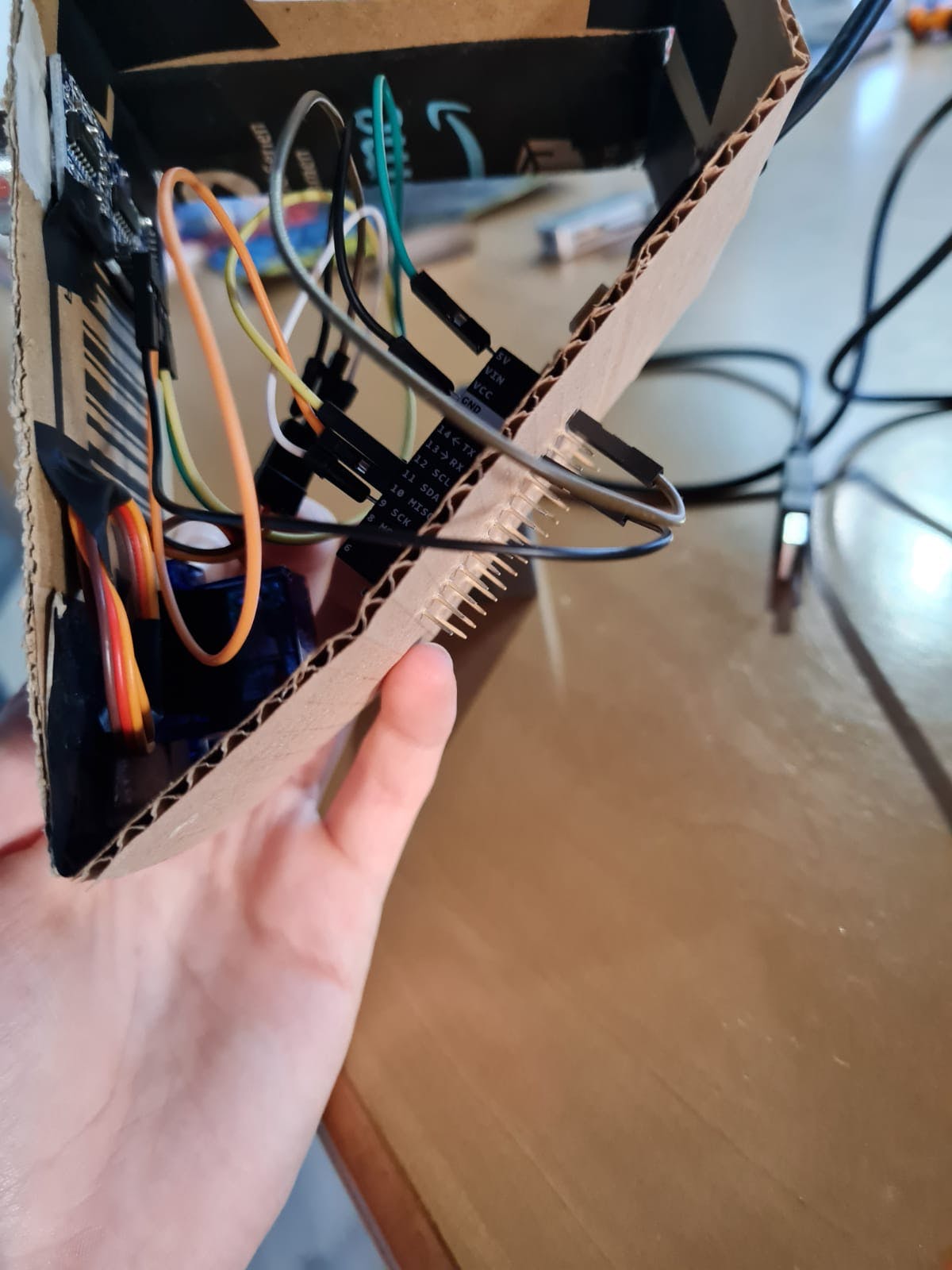

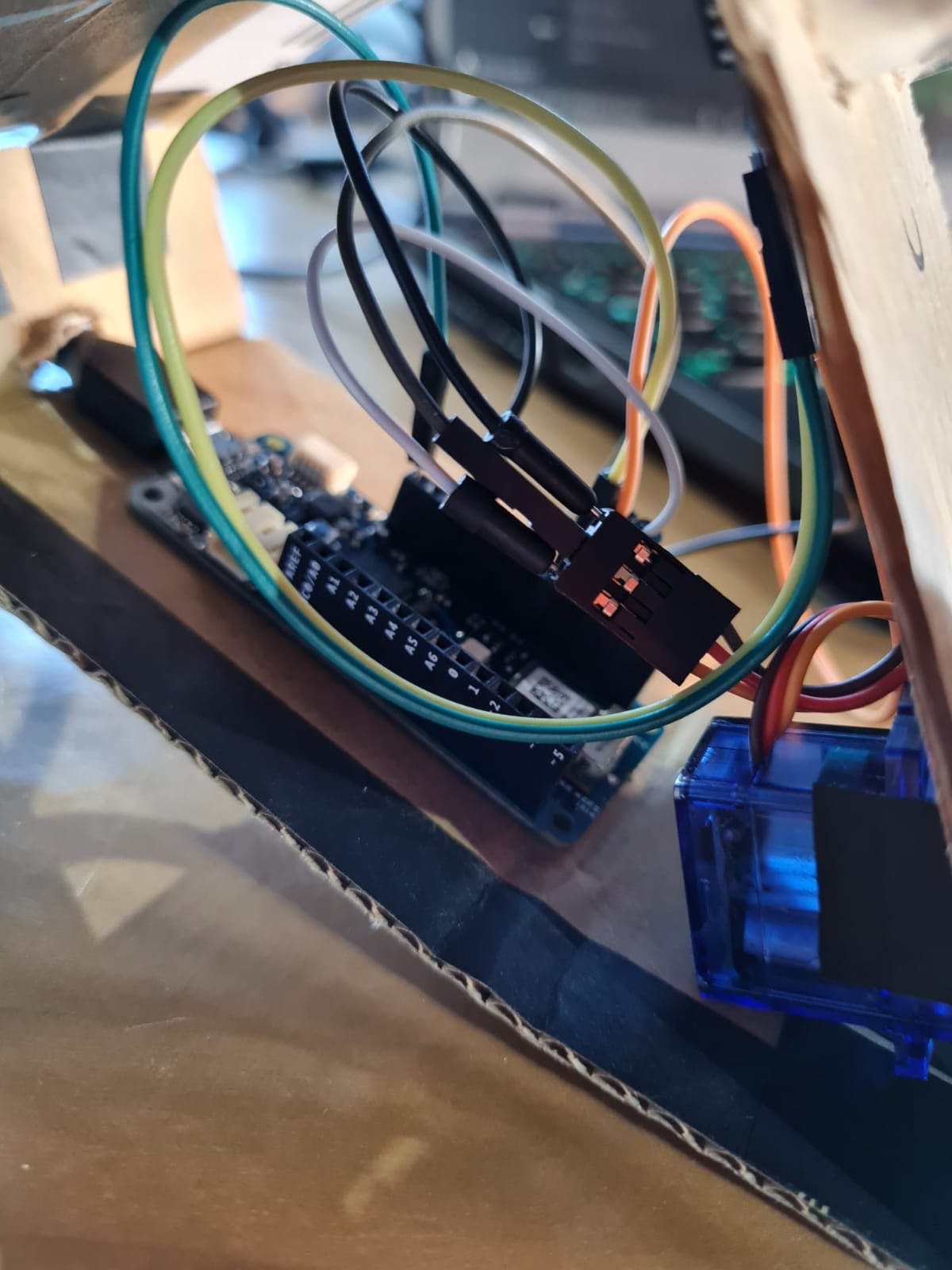
在此之后,我还连接了超声波传感器,并添加了一些代码和完整的电路
#include
现在你有了机器人的版本 1,你已经可以使用它了!
版本 2
最后一步是 Blynk 应用程序。
从应用商店/游戏商店下载 Blynk 并创建一个新应用。使用Arduino MKR1010 WiFi如何板和WiFi如何连接。然后只添加一个“通知”项。继续您的邮件并获取授权码,然后上传完整的代码。
我希望你能喜欢这个项目。你可以在其他社交网站上找到我。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



