
资料下载


M-G370PDF1(IMU)

一般描述
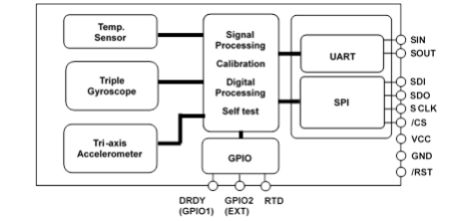
M-G370PDF1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用
高精度补偿技术。各种校准参数被存储在IMU的存储器中,并且是
在IMU的电源被打开后,自动反映在被发送到应用程序的测量数据中。M-G370PDF1通过支持对主机通信的通用SPI/UART功能,减少了用户可以使用的技术障碍
引入惯性测量和最小化设计资源,以实现惯性运动分析和控制应用。IMU具有高稳定性、高精度、小尺寸等特点,使其易于创建和区分在工业系统的各个领域的应用。
特点
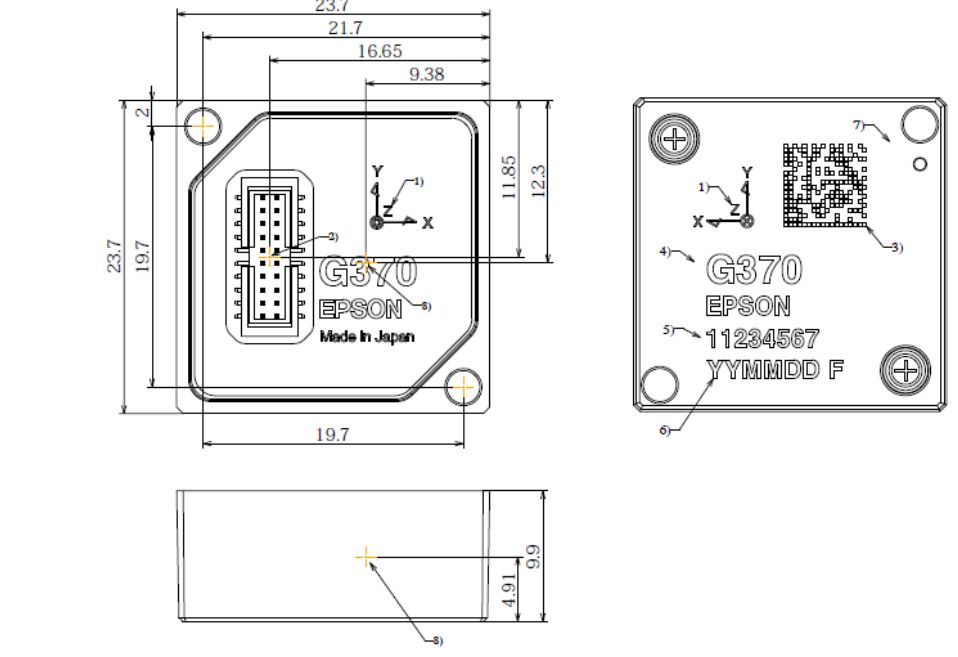
小尺寸,轻重量: 24x24x10mm3, 10g
低噪声、高稳定性
偏置不稳定性:0.8°/h
角随机游走: 0.06°/√h
初始偏置误差:360°/h(1σ)/2mG(1σ)
6个自由度
三重陀螺仪: ±450°/s,
三轴加速度计: ±10 G
16/32位数据分辨率
数字串行接口:SPI / UART
校准稳定性(偏差、比例因子、轴向对准)
数据输出速率:至2k Sps
外部触发器输入/外部计数器重置输入
增量角度/增量速度输出
校准温度范围:−40.C至+85.C
工作温度范围:−40.C至+85.C
单次电压供电:3.3 V
低功耗:16 mA(类型)
应用程序
天线平台稳定、照相机胶卷、导航系统、振动控制和稳定、指向和跟踪系统、自动驾驶汽车

功能框图
规格
TA=25°C,VCC=3.3V,角速率=0°/s,≤±1G,除非另有说明。

*1)这是一个用于内部温度补偿的参考值。不能保证该值给出了内部值的绝对值
温度
*2)这是上16位(TEMP_HIGH)的温度比例因子。
*3)每天打开/打开,估计连续5天的变化。
注)规格中的值基于工厂校准的数据。这些值可能会根据产品的使用方式而变化。
注意)规范中的Typ值是平均值或1σ值。
注)除非另有说明,规范中的最大/最小值为工厂测试时的设计值或最大/最小值
操作条件

轮廓尺寸:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




