
资料下载


×
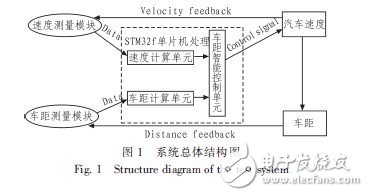
车辆安全距离智能控制与自刹车系统
消耗积分:0 |
格式:pdf |
大小:1.13 MB |
2013-05-06
分享资料个
为避免两车在同车道行驶中因追尾发生交通事故,本项目根据追尾事故的产生原因研制了车距安全距离智能控制与自刹车模拟系统。本模拟系统运用霍尔传感器以及加速度传感器测量后车车速Vb、采用超声波回波测距原理测量前后车的车辆间距ΔS,利用stm32f103zet6单片机处理数据,并根据两车的运行状况,后车自动调整行驶速度,从而实现后车与前车的安全车距的智能控制。实际测试表明,本系统可以实现安全车距的智能控制,达到设计要求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 douliang8
2013-06-05
0 回复 举报顶一个 收起回复
douliang8
2013-06-05
0 回复 举报顶一个 收起回复
- 相关下载
- 相关文章




