
资料下载


×
采用ArduinoNano控制模块的DIY超声波测距平衡小车
消耗积分:0 |
格式:rar |
大小:2541KB |
2017-06-10
分享资料个
DIY超声波测距平衡小车 采用Arduino Nano控制模块
项目概述
因为第一次制作自平衡小车,心里没底,也就没有投入过多的资金,一切按照最小配置进行,所以选择“TT马达”,俗称“香蕉电机”的小车底盘。在等快递送货期间,才看到各种说用“香蕉电机”做自平衡小车的问题,最大的问题就是电机启动对传感器和单片机的干扰问题,还有就是平衡的稳定性不好等问题。在我以Arduino + MPU6050 + L298N为核心做完后,闲得没事干,就想做一款成本低,易上手,最小配置和最基本功能的自平衡小车,其目的就是给那些没有什么经验的刚入行的新手们提供一个入门的解决方案。所以这个项目的目标有以下几点:
a、成本低;
b、目标功能明确,就是实现小车的自平衡;
c、系统稳定可靠;
d、调试、操作方便简单。
硬件设计
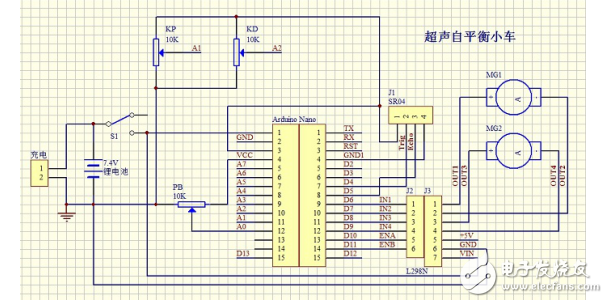
硬件设计比较简单,以Arduino Nano为核心控制模块,采用HC-SR04超声波测距模块,L298N电机驱动模块,供电采用7.4V/2200mAh锂电池。图中三个10K电位器分别用于平衡点设置、PD算法中Kp和Kd系数设置的调整。
电路原理图如下所示:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 chan_jt2005
2018-01-21
0 回复 举报多谢啦。嘻嘻嘻 收起回复
chan_jt2005
2018-01-21
0 回复 举报多谢啦。嘻嘻嘻 收起回复
- 相关下载
- 相关文章




