
资料下载


×
坐标变换和矩阵变换的原理
消耗积分:0 |
格式:rar |
大小:0.93 MB |
2017-09-05
分享资料个
矢量控制系统的坐标变换包括精致坐标系间的变换、旋转与静止坐标系间的变换以及指直角坐标系与极坐标系间的变换。其中三相静止坐标系和两相静止坐标系间的变换,简称3s/2s变换(也称Clarke变换)、两相静止坐标系和两相旋转坐标系间的变换,简称2s/2r变换(也称Park变换)。
坐标变换和矩阵变换的原理放在交流电机里头介绍比较容易理解,所以下面介绍的坐标变换和变换矩阵都以交流电机模型来说明。
不同电动机模型彼此等效的原则是:在不同坐标下所产生的磁动势完全一致。
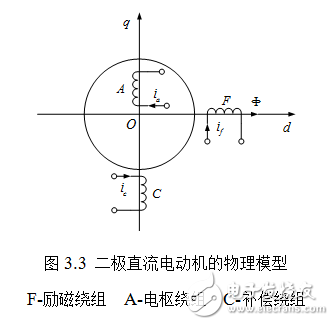
众所周知,在交流电动机三相对称的静止绕组A、B、C中,通以三相平衡的正弦电流,,时,所产生的合成磁动势F,它在空间呈正弦分布,以同步转速(即电流角频率)顺着A-B-C的相序旋转。这样的物理模型绘于图3.3中的定子部分。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





下载排行榜
- 暂无相关数据

