
资料下载


×
车载网定位跟踪算法及设计
消耗积分:0 |
格式:rar |
大小:0.2 MB |
2017-09-05
jfsteve
分享资料个
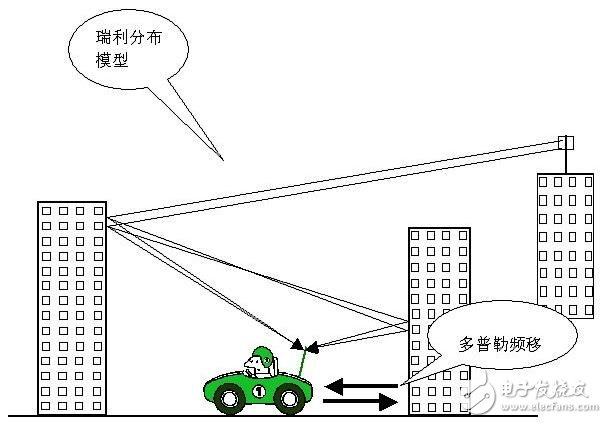
自从人们把解决交通拥塞和交通事故的目标转向车载自组织网以来,车载网已成为国内外研究的热点课题。对高速运动的车载来说,车载网是否具有精确实时的定位能力,成为解决一切问题的基础。Hohman等人利用GPS接收机设计了一个只有2 cm定位误差的导航系统,但他们并没有考虑在一些不能使用GPS的区域,如隧道。张传斌等人则把UKF滤波方法应用到车载导航中,但UKF滤波方法计算量大,难以满足高速公路上实时性要求很高的车载定位跟踪系统。针对以上问题,本文提出了一种计算量小且实时性较高的车载网定位跟踪算法。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



