
资料下载


工业机器人TCP的含义和TCP类型的介绍
分享资料个
什么是工业机器人TCP?
为了描述一个刚体在空间的位姿,需在物体上固连一个坐标系,然后确定该坐标系位姿(原点位置和三个坐标轴姿态),即需要6个DOF来完整描述该刚体的位姿[1]。对于工业机器人,需要在末端法盘安装工具(Tool)来进行作业。为了确定该工具(Tool)的位姿,在Tool上绑定一个工具坐标系TCS (Tool Coordinate System),TCS的原点就是TCP(Tool Center Point,工具中心点)。在机器人轨迹编程时,需要将TCS在其他坐标系的位姿记录到程序中执行。TCP类型的有:常规TCP,固定TCP,动态TCP。
01常规TCP:随机器人本体一起运动
工业机器人一般都事先定义了一个TCS,TCS的XY平面绑定在机器人第六轴的法兰盘平面上,原点则与法兰盘中心重合。虽然可以直接使用默认的TCP,但是在实际使用时,比如焊接,用户通常把TCP点定义到焊丝的尖端(实际上是焊枪tool的坐标系在tool0坐标系的位姿),那么程序里记录的位置便是焊丝尖端的位置,记录的姿态便是焊枪围绕焊丝尖端转动的姿态。
02固定TCP
将TCP定义为机器人本体以外静止的某个位置。常应用在涂胶上,胶罐喷嘴静止不动,机器人抓取工件移动。其本质是一个工件坐标。
03动态TCP
随着更复杂的应用,TCP可以延伸到机器人本体轴外部(外部轴),应用在TCP需要相对法兰盘做动态变化的场合。
随着工业的发展进程,工业自动化技术逐渐成熟。越来越多的高精密、高复杂程度的制造工业对生产精度提出了更高的需求,这大大推动了工业生产中机器人的使用。
TCP精度测试原因
随着全球工业自动化生产的持续升级,作为生产自动化主要实现手段之一的工业机器人在工业生产中得到了越来越广泛的应用,不仅已广泛应用于搬运、喷漆、焊接等作业,而且也开始应用于诸如自动装配、尺寸检测等超精密作业。现在机器人厂家生产的机器人重复定位精度比较高,绝对定位精度却很低,仅为毫米级,无法达到高精度加工的要求。
TCP精度测试分析依据
在机器人加工、装配过程中不可避免地要产生误差,机器人作业过程中的磨损也会使运动副间产生间隙,而且实际构件都具有弹性,高速运动时在惯性力、重力和外力作用下势必会产生弹性变形和震动等问题。工业机器人是由运动学模型(如图1所示)控制的,在运动学模型中所导致的的结构参数是设计值,这与实际结构参数之间不可避免地存在误差,导致机器人无法严格按照预期位姿要求进行运动,直接测量这些结构参数往往很困难。
不过,这些结构参数误差必定会通过一定的形式反映出来,最直接的体现就是末端执行器的TCP精度。测试机器人末端执行器的TCP精度能推导机器人的误差源,然后通过启帆精度分析离线软件仿真(如图2所示)分析,可以清楚的发现误差对机器人末端执行器的影响,根据离线仿真分析,合理的分配与控制各个影响因子可达到提高机器人末端执行器的运行精度的目的。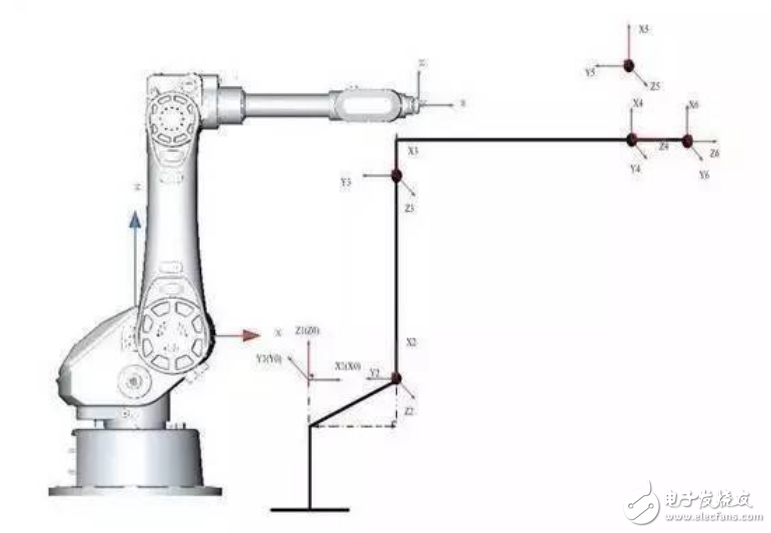
图1 运动学模型

图2仿真分析
TCP精度的检测
根据机器人误差源的分析,如何检测得到有效的处理数据是TCP精度测试过程中一个重要的环节,工业机器人精度的测量是提高TCP精度的一个极其重要的因素,它是结构参数辨认精度。任何一个测量过程都是包括测量对象、计量单位、测量方法和测量精度这四个要求。要准确可靠地进行测量,必须对这四个要素进行全面的分析、正确的选用。因此,制定正确的检测方案是关键,影响着整个TCP精度测试的分析: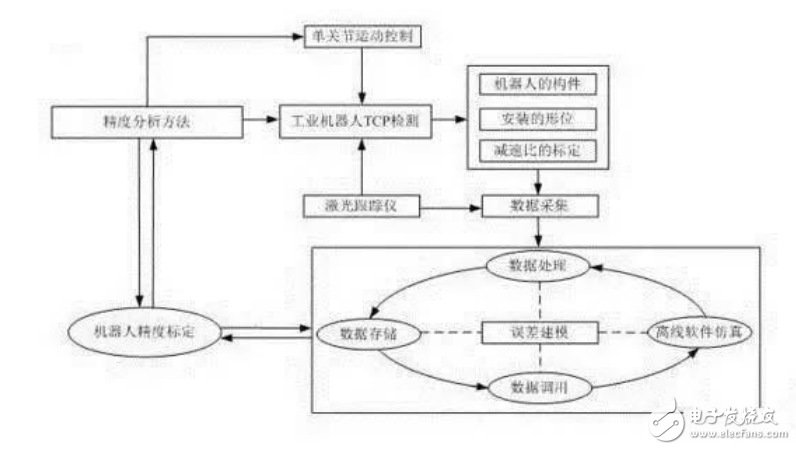
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



