
资料下载


×
机器人控制器的定义与分类及其体系结构的研究现状
消耗积分:0 |
格式:rar |
大小:0.2 MB |
2017-10-17
分享资料个
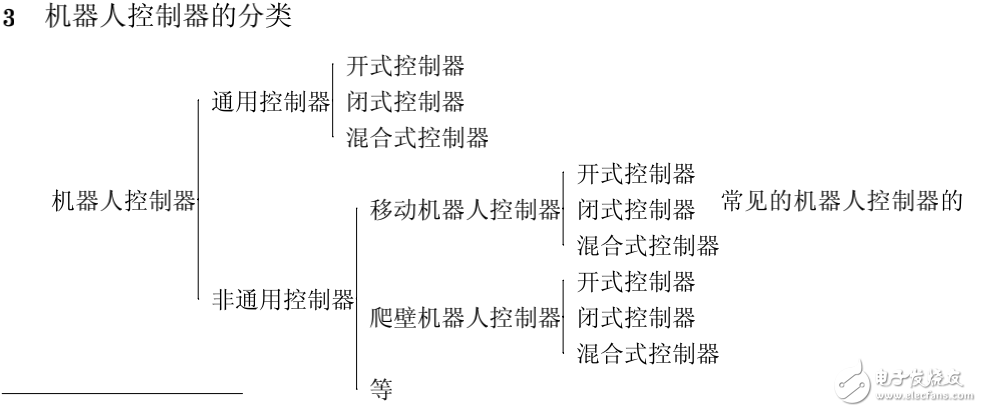
本文首先给出了机器人控制器的定义和分类。介绍了机器人控制器体系结构方面的研究情况,提出了有关机器人体系结构研究发展的几个方向。
机器人控制器体系结构主要是指控制机器人的软件和硬件结构o通常也简称为机器人体系结构q 研究机器人体系结构的目的是为简化机器人系统的设计和开发o特别是随着机器人控制和功能日益复杂化o而越来越受到重视q目前o有关机器人体系结构的研究主要集中在两类系统上q一是基于性能的或反应式的系统o其特点是紧耦合!最小化计算和实现任务的性能分解~另一是异步!同步控制和数据流混合系统o异步处理的特征是松耦合和基于事件的驱动o而同步处理的特征是紧耦合!使用公共时钟和严格的实时性要求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






