
资料下载


基于闭环系统辨识的数字前馈控制
分享资料个
在闭环系统辨识的基础上,本节讨论基于闭环系统逆的控制器设计问题。
5.6.1 零相差前馈控制基本原理
通常, 前馈控制是基于不变性原理,即将前馈控制环节设计成待校正的闭环系统的逆,从而使校正后系统的输入输出传递函数为1,从而达到精确控制。但当闭环系统为非最小相位系统时,这种方法就不适用了。这是由于非最小相位系统的逆会出现不稳定的极点。
随着计算机技术的发展,现代高精度伺服控制中,采样频率通常较高,采样周期的范围在 - 之间。由于采样频率很高,离散化的闭环系统一般为非最小相位数字系统,即闭环系统的零点至少有一个在单位圆之外。因此非最小相位数字系统在实际工程应用中非常广泛。
零相差跟踪控制器(ZPETC, Zero Phase Error Tracking Control)是一种数字前馈控制器,适用于闭环系统为非最小相位的数字控制系统,该控制器由日本学M.Tomizuka提出[1]。零相差前馈控制器通过在控制器中引入零点来补偿闭环系统的不稳定零点,当指令超前值已知时,校正后的系统在全频域范围内相移为零,在低频范围,增益近似为1。
零相差前馈跟踪控制在数控加工中心、坐标仪以及绘图仪等高精度伺服系统中得到了成功应用,有效地拓宽了系统频带。
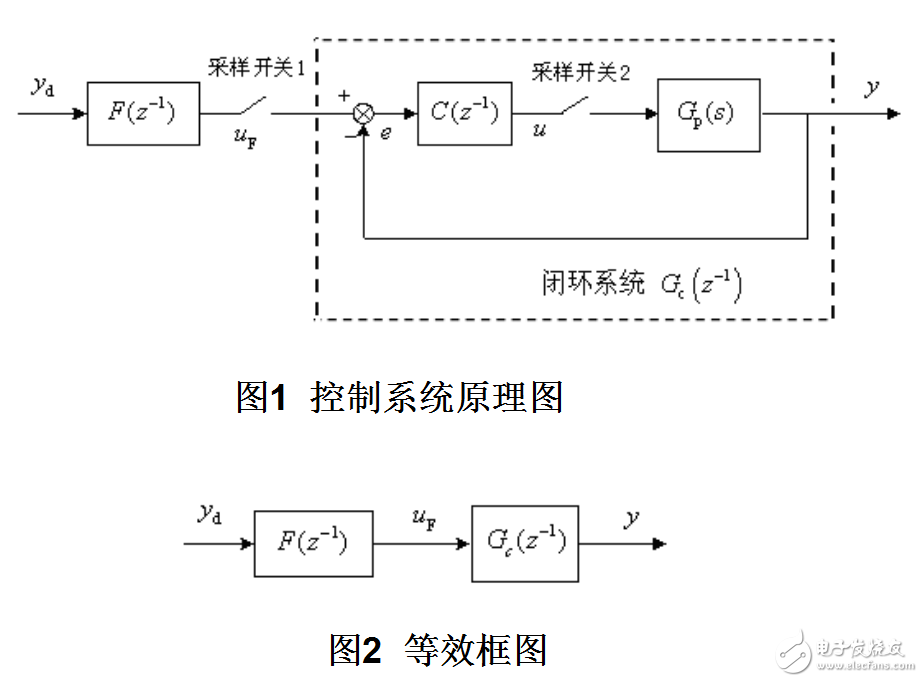
基于零相差前馈控制器的控制系统如图1所示,其中 为输入指令信号, 为系统输出, 为前馈控制器, 为闭环控制器, 为对象的传递函数,虚线框内 为闭环控制系统。设离散化后的闭环系统传递函数为 ,则图1可以进一步化简,得到图2。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





