
资料下载


基于多传感器系统的智能轮椅的设计方案
分享资料个
智能轮椅的任务是安全、便捷地把用户送到目的地,完成既定任务。在运动过程中,轮椅既需要接受用户的指令,又需结合环境信息启动自身避障、导航等功能模块,与移动机器人不同的是,在使用过程中,轮椅与用户成为一个协同工作的系统。这就要求在设计之初就把人这个因素纳入考虑之中,所以,安全、舒适和容易操作应成为智能轮椅设计中最重要的因素;使用者身体能力的差异决定了智能轮椅需被设计为一个功能多元化,能满足多种层次需要的电子系统,而模块化最能体现系统多功能化的特征,每个用户都能根据其自身残障类型和程度选择适当的模块集成,且设计者可以在现有基础上通过增添功能模块,很方便地对轮椅功能进行改进。本文着重就智能轮椅模块化设计进行了阐述。
1 传感器系统总体结构设计
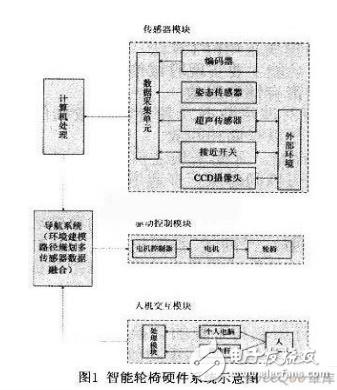
智能轮椅的总功能可以分为以下几个子功能:环境感知及导航功能、控制功能、驱动功能和人机交互功能。通过对智能轮椅的功能分析和模块划分,再结合具体的研究内容和期望控制目标,本系统主要由传感器模块、驱动控制模块和人机交互模块3部分组成,硬件系统结构如图1所示。其中传感器模块主要有内部状态感知和外部环境感知两部分构成,通过姿态传感器确定轮椅自身的位姿信息;通过编码器的位移速度和距离获得自定位信息;视觉、超声波和接近开关主要负责持续获得周围环境和障碍物的距离信息。驱动控制模块我们采用后轮驱动的方式,每一个后轮配置一个电动机,在控制器的操作下实现电动轮椅的前进、后退和转向。人机交互界面由操作杆和个人电脑界面数据输入两种方式,实现基本的人机交互功能。
其中,数据采集单元拟选择DSP TMS320LF2407A作为传感器模块的控制芯片。TMS320LF2407A是一款高性能的数字信号处理器,它具有较高的频率,丰富的外围接口。它的主频可达150MHz、低功耗(核电压1.8V,I/O电压3.3V);128kXl6位片上FLASH,18kXl6位片上SRAM,4kXl6位片上ROM;用于电机控制的外设,2个事件管理器;多种标准串口外设,1个SPI同步串口、2个UART异步串口、1个增强型CAN总线接口、1个McBSP同步串口;16通道的12位A/D转换器;56个独立可编程、复用型、通用I/O口。能够符合本系统设计的要求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





