
资料下载


×
基于三轴转台的卫星地面半物理仿真解耦方法
消耗积分:0 |
格式:rar |
大小:1.11 MB |
2017-11-07
分享资料个
随着我国卫星事业的快速发展,对卫星控制的精度要求越来越高,卫星在地面的半物理仿真实验要求也随之提高。卫星的半物理仿真实验中的一个重要组成部分就是利用三轴转台模拟卫星在太空的三轴角速度,并利用光纤陀螺采集三轴转台数据,反馈给星载计算机,为卫星确定姿态提供数据。卫星的姿态轨道控制工作模式包括太阳捕获模式、对日保持模式、最小安全模式、地球捕获模式、正常工作模式、轨道控制模式和无控模式。光纤陀螺是一种测量卫星三轴姿态角速率的高精度敏感器,它分别工作在太阳捕获模式、对日保持模式、地球捕获模式、轨道控制模式中。
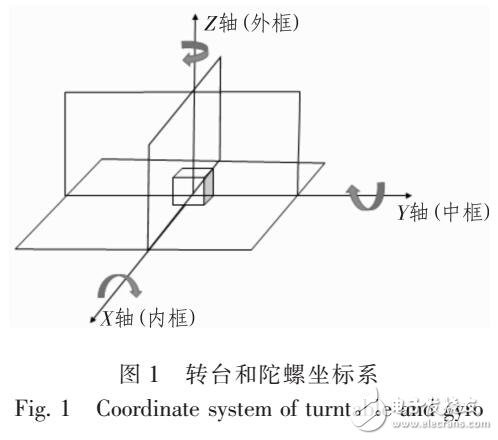
三轴转台由外框、中框、内框组成,分别实现三轴的旋转。由于设计原凶,中框安装在外框上,内框安装在中框上。外框带动中框和内框一起旋转,中框带动内框旋转,凶此3个转台轴存在耦合关系。当中框旋转导致内框与外框在一个平面上时,转台控制将会m现奇异,内框与外框的转速都会趋向于无穷大。针对在卫星半物理仿真出现的上述问题,分析转台三轴运动的数学关系,并提出一种新型解耦方法进行仿真。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




