
资料下载


×
汽车环视系统设计完整硬件平台设计方案
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-11-20
分享资料个
一、项目背景
1.1 研究背景
本项目研究内容是开展汽车环视系统((AVM)技术与产品的研究与开发,通过驾驶员实时实景环视辅助系统,提高汽车行驶及停车时的安全性。主要研究内容包括: AVM产品技术与功能分析;产品规格总体设计;实时数字图像快速处理;图像显示加速;多场景、多视点图像几何处理及其合成拼接成像技术;高性能处理平台设计;车载数字图象质量Qos研究;AVM产品样机设计开发等。
1.2 基于AVM平台采用FPGA算法的优越性
采用可编程的FPGA进行设计,便于设计的更新与升级,节约成本。
通过使用图像拼接技术,使系统在图像呈现的清晰性、稳定性和可靠性得到有效地保证。
LCD体积小、质量轻、功耗低,可以用大规模集成电路直接驱动,可以在明亮环境下显示,不含射线伤害。
二、项目方案
2.1、实现功能
1 )通过处理四组影像,合成为一幅360度的图像制成如同从上方俯瞰车辆一样的影像后显示在显示器上。
2 )利用FPGA算法,通过使用图像拼接技术对于对预处理后的四幅图像进一步切割,已达到完美的反走样拼接。
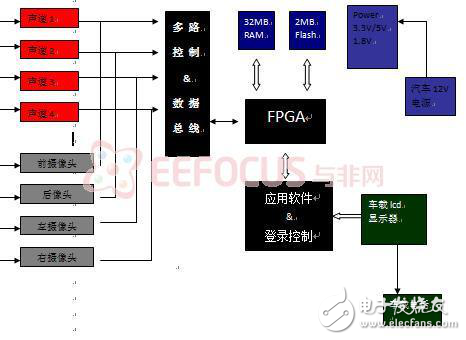
2.2方案设计原理
该方案使用AVM硬件平台,系统原理框图如下:
三、硬件设计框图
Spartan-6承担4幅图像实时处理的任务,对来自每个摄像机的原始图像进行几何坐标变换、反走样、矫正、拼接等处理;
4xVideo In:连接4个CMOS数字摄像头,直接物出YUV数字视频信号;
1xVideo Out:用于连接车载TFf LCD显示器用于显示360度的全景图象;
四组x120-180度广角高分辨率小型数字摄像头(CMOS/CCD) ;
7英寸彩色LCD液晶显示屏(分辨率720x480像素);
摄像头辅助声纳系统可以作为选配,能够起到距离测量和声音警示的作用。并可以通讯与系统在相对应的显示区域用颜色警示,配合AVM系统给驾驶员最大的安全保障。
四、辅助泊车
1) 无车区域和停车位置搜索和定位。
2) 自动辅助泊车控制。
辅助泊车系统通过安装在车身上的摄像头,超声波传感器,以及红外传感器,探测停车位置,绘制停车地图,并实时动态规划泊车路径,将汽车指引或者直接操控方向盘驶入停车位置。
3)辅助泊车传感器信息处理和地图绘制。
1.1 研究背景
本项目研究内容是开展汽车环视系统((AVM)技术与产品的研究与开发,通过驾驶员实时实景环视辅助系统,提高汽车行驶及停车时的安全性。主要研究内容包括: AVM产品技术与功能分析;产品规格总体设计;实时数字图像快速处理;图像显示加速;多场景、多视点图像几何处理及其合成拼接成像技术;高性能处理平台设计;车载数字图象质量Qos研究;AVM产品样机设计开发等。
1.2 基于AVM平台采用FPGA算法的优越性
采用可编程的FPGA进行设计,便于设计的更新与升级,节约成本。
通过使用图像拼接技术,使系统在图像呈现的清晰性、稳定性和可靠性得到有效地保证。
LCD体积小、质量轻、功耗低,可以用大规模集成电路直接驱动,可以在明亮环境下显示,不含射线伤害。
二、项目方案
2.1、实现功能
1 )通过处理四组影像,合成为一幅360度的图像制成如同从上方俯瞰车辆一样的影像后显示在显示器上。
2 )利用FPGA算法,通过使用图像拼接技术对于对预处理后的四幅图像进一步切割,已达到完美的反走样拼接。
2.2方案设计原理
该方案使用AVM硬件平台,系统原理框图如下:
三、硬件设计框图
Spartan-6承担4幅图像实时处理的任务,对来自每个摄像机的原始图像进行几何坐标变换、反走样、矫正、拼接等处理;
4xVideo In:连接4个CMOS数字摄像头,直接物出YUV数字视频信号;
1xVideo Out:用于连接车载TFf LCD显示器用于显示360度的全景图象;
四组x120-180度广角高分辨率小型数字摄像头(CMOS/CCD) ;
7英寸彩色LCD液晶显示屏(分辨率720x480像素);
摄像头辅助声纳系统可以作为选配,能够起到距离测量和声音警示的作用。并可以通讯与系统在相对应的显示区域用颜色警示,配合AVM系统给驾驶员最大的安全保障。
四、辅助泊车
1) 无车区域和停车位置搜索和定位。
2) 自动辅助泊车控制。
辅助泊车系统通过安装在车身上的摄像头,超声波传感器,以及红外传感器,探测停车位置,绘制停车地图,并实时动态规划泊车路径,将汽车指引或者直接操控方向盘驶入停车位置。
3)辅助泊车传感器信息处理和地图绘制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





