
资料下载


×
基于ARM和ADIS16355的汽车二自由度数据采集系统分析
消耗积分:1 |
格式:rar |
大小:0.3 MB |
2017-11-21
分享资料个
汽车的二自由度横摆角速度与侧向加速度这两个参数对汽车的稳定性分析具有重要作用,是汽车主动安全的重要组成部分,可以通过预测与实测两种方式获得。为了得到更真实的数据,本文设计了基于ARM微控制器和ADIS16355传感器的数据采集系统,通过实车测试得到了汽车的横摆角速度与侧向加速度的数据,分析了干扰源,并且对数据采用卡尔曼滤波方法进行处理。
1系统工作原理
ADIS16355传感器装在接近汽车的中心位置上(接近汽车的质心位置),建立汽车的三维坐标系如图1所示。
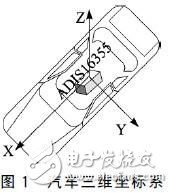
汽车X、Y、Z三个方向的旋图1汽车三维坐标系转角速度与加速度可通过ADIS16355传感器测得,测得的数据通过ADC转换成数字信号,然后通过SPI串行通信协议把采集到的数据传送到控制器中,这里只取侧向加速度与横摆角速度这两个信息量。采用的控制器是Philips公司生产的ARM7处理器LPC2119.数据采集系统工作原理如图2所示。

2系统模块介绍
2.1 LPC2119简介
ARM是指精简指令集的微处理器,具有高性能、廉价、低耗能的特点,在各个领域得到了广泛的应用。该系统采用的是ARM7系列的LPC2119微控制器。LPC2119是基于一个支持实时仿真和跟踪的16/32位ARM7TDMI-S内核的微控制器,并带有128 KB的高速Flash存储器;指令支持32位的ARM模式与16位的Thumb模式:128位宽度的存储器接口和独特的加速结构使32位代码的ARM方式能够在最大时钟速率下运行;对代码规模有严格控制的应用可使用16位Thumb模式将代码规模降低超过30%,而性能的损失却很小。LPC2119具有非常小的64脚封装、极低的功耗、多个32位定时器、4路10位ADC、2路CAN总线、PWM通道、46个GPIO以及多达9个外部中断,功耗低,性能强大,特别适用丁汽车、工业控制应用以及医疗系统和容错维护总线。由于内置了宽范围的串行通信接口,也非常适合于通信网关、协议转换器以及其他各种类型的应用。
1系统工作原理
ADIS16355传感器装在接近汽车的中心位置上(接近汽车的质心位置),建立汽车的三维坐标系如图1所示。
汽车X、Y、Z三个方向的旋图1汽车三维坐标系转角速度与加速度可通过ADIS16355传感器测得,测得的数据通过ADC转换成数字信号,然后通过SPI串行通信协议把采集到的数据传送到控制器中,这里只取侧向加速度与横摆角速度这两个信息量。采用的控制器是Philips公司生产的ARM7处理器LPC2119.数据采集系统工作原理如图2所示。
2系统模块介绍
2.1 LPC2119简介
ARM是指精简指令集的微处理器,具有高性能、廉价、低耗能的特点,在各个领域得到了广泛的应用。该系统采用的是ARM7系列的LPC2119微控制器。LPC2119是基于一个支持实时仿真和跟踪的16/32位ARM7TDMI-S内核的微控制器,并带有128 KB的高速Flash存储器;指令支持32位的ARM模式与16位的Thumb模式:128位宽度的存储器接口和独特的加速结构使32位代码的ARM方式能够在最大时钟速率下运行;对代码规模有严格控制的应用可使用16位Thumb模式将代码规模降低超过30%,而性能的损失却很小。LPC2119具有非常小的64脚封装、极低的功耗、多个32位定时器、4路10位ADC、2路CAN总线、PWM通道、46个GPIO以及多达9个外部中断,功耗低,性能强大,特别适用丁汽车、工业控制应用以及医疗系统和容错维护总线。由于内置了宽范围的串行通信接口,也非常适合于通信网关、协议转换器以及其他各种类型的应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





