
资料下载


×
步进电机驱动、存储电路设计及外围电路
消耗积分:1 |
格式:rar |
大小:0.6 MB |
2017-11-21
分享资料个
步进电机(Step motor)是将电脉冲信号转变为角位移e(或线位移S)的开环控制元件,是数字控制系统的一种执行元件。工作原理是建立在被励磁的定子电磁铁吸引可选转的衔铁产生转矩而旋转,即靠磁铁引力作用把电磁能转换成机械角位移。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率
和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。脉冲的个数决定了转角的大小,而脉冲的频率决定了电机的转速。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。一般步进电机可分为二相、三相、四相和六相。
本系统步进电机选用深圳伟力驱动有限公司的VID29系列二相汽车仪表步进电机。 vID29-XX/VID29~xXp仪表步进电机是一种精密的步进电机,内置减速比180/1的齿轮系,主要应用于车辆的仪表指示盘,也可以用于其他仪器仪表装置中,将数字信号直接准确地转为模拟的显示输出。VID29步进电机需要两路逻辑脉冲信号驱动,其特点如下:
可以工作于3.5V一10V的脉冲下;
输出轴的步距角最小可以达到1/120,最大角速度6000/s,输出转角转动范围为3150。可用分步模式或微步模式驱动。
选用进口优质特种材料和汽车级特殊工程塑料,同时兼顾防火等安全性能;
采用具有最低噪声和超低摩擦效果的特殊齿形,保证了马达的长期运转寿命和性能。
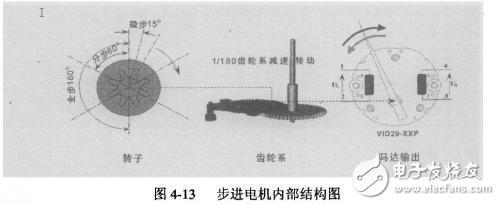
步进电机的分步驱动控制模式:VID29步进电机是经三级齿轮减速转动输出的,驱动要求是用标准的SV逻辑电路电压,可以以分步驱动模式直接驱动马达,电流需求为20mA。在分步模式下,每个脉冲可以驱动马达转子转动600(即输出轴转动1/3度)。电机转动的方向取决于施加在电机左右线圈上的周期性脉冲序列的相位差。如下图所示,左线圈电压UL相位超前于右线圈电压UR时(相位差为/3),VID29一XX系列的电机输出轴将顺时针旋转,VID29一XXP系列的电机输出轴将逆时针旋转。
和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。脉冲的个数决定了转角的大小,而脉冲的频率决定了电机的转速。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。一般步进电机可分为二相、三相、四相和六相。
本系统步进电机选用深圳伟力驱动有限公司的VID29系列二相汽车仪表步进电机。 vID29-XX/VID29~xXp仪表步进电机是一种精密的步进电机,内置减速比180/1的齿轮系,主要应用于车辆的仪表指示盘,也可以用于其他仪器仪表装置中,将数字信号直接准确地转为模拟的显示输出。VID29步进电机需要两路逻辑脉冲信号驱动,其特点如下:
可以工作于3.5V一10V的脉冲下;
输出轴的步距角最小可以达到1/120,最大角速度6000/s,输出转角转动范围为3150。可用分步模式或微步模式驱动。
选用进口优质特种材料和汽车级特殊工程塑料,同时兼顾防火等安全性能;
采用具有最低噪声和超低摩擦效果的特殊齿形,保证了马达的长期运转寿命和性能。
步进电机的分步驱动控制模式:VID29步进电机是经三级齿轮减速转动输出的,驱动要求是用标准的SV逻辑电路电压,可以以分步驱动模式直接驱动马达,电流需求为20mA。在分步模式下,每个脉冲可以驱动马达转子转动600(即输出轴转动1/3度)。电机转动的方向取决于施加在电机左右线圈上的周期性脉冲序列的相位差。如下图所示,左线圈电压UL相位超前于右线圈电压UR时(相位差为/3),VID29一XX系列的电机输出轴将顺时针旋转,VID29一XXP系列的电机输出轴将逆时针旋转。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





