
资料下载


怎样确定直流电机驱动的pwm频率
分享资料个
如何确定直流电机驱动的 PWM 频率
—— 圆梦小车改进中的个人感悟
在“圆梦小车强身健体啦”一文中,提到了新的电机在原来的驱动程序下不能正常工作
之事,本文将详述其中原委。
一、问题的来由
此问题在我第一次涉及直流电机驱动时就遇到了,可翻遍所有资料,都没有给我一个完美的答复,因为我一直觉得应该根据电机的特性来选择 PWM 的频率。
直流小电机的特性差别很大,一般遥控玩具的电机通常为 1A 以下,这是为了降低驱动电路的成本,通常使用 8050、8550 就可以驱动。
而遥控模型级别的电机不同,它们的目标是速度,所以电机通常动辄 10A,甚至几十安都有,读者可以去搜索一下模型用的电调(电子调速器,也是 PWM 控制模式),那些指标都是 50A、90A、130A 等等,第一次我看了都“晕”!看看照片,哪个不是一堆 MOS 管并联?所以价格也不菲,通常都成百上千。
一般用于工业控制的减速电机则不然,由于有很大的减速比,且电压一般为 12V,所以电流通常很小,在几百毫安级别,正常工作只有几十毫安,这是由于他们要求低功耗,增加可靠性。
而电机控制的 PWM 模式讨论似乎针对第二类的较多。因为 PWM 控制对于遥控模型的重要程度较高。而遥控玩具一般不调速,H 桥只是为了换向。工业控制由于减速后转速已很低,不再迫切需要调速了,直接用通断控制已能满足大多数的要求。
似乎只是由于“机器人比赛”才将小电流直流电机的调速引入。由于比赛机器人的特殊性,产生了一种中间状态的需求:
¾ 它们不像遥控模型那样追求速度,但想要类似于遥控模型的操控特性;
第 1 页 共 8 页
如何确定直流电机驱动的 PWM 频率 www.embedream.com
![]()
¾ 它们不满足于遥控玩具那种简单的控制,却要相当于遥控玩具电机那样的电流;
¾ 因为机器人比赛不像赛车,穷其全力一搏,只求瞬间辉煌;它需要有一定时间去做一些蕴含智慧的活动,而不是四肢发达的“莽汉”,所以要有一定的“耐力”。
二、少而“模糊”的答案
在写“寻迹小车 FollowMe”一文时,我找了许多资料,但没有找到一篇可以帮我释疑
解惑的。下面就是几篇我所找到的文章摘录:
1)有的这样说:“PWM 控制的基本电路与 ON/OFF 控制相同,电路构成也很简单,施
加在电机上的 PWM 信号一般为几千赫至几十千赫”(摘自《机器人控制电子学》P76 *1)。
2)有的这样说:“PWM 控制对频率的要求一般不是太高。从 50Hz 到 1000Hz 的频段,
电机都可以正常工作。”(摘自《机器人探索 —— 工程实践指南》P129 *2)
3)只有这篇描述的略详细(摘自《机器人设计与控制》P183 *3):
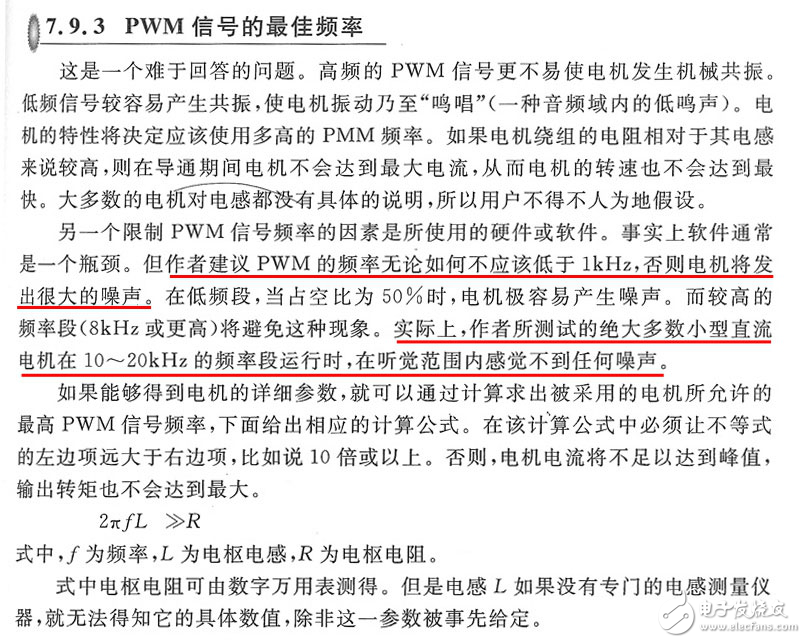
此段文字提到了我所关注的问题:电机特性对 PWM 频率的影响。可是它的结论和建议
第 2 页 共 8 页
如何确定直流电机驱动的 PWM 频率www.embedream.com
却给我带来了更多的困惑!(看红线所标注的)
读者可以对照一下,这三篇内容就相互“冲突”的厉害,也许读者认为我是断章取义,
作者也许在前或后有先决条件,那可以帮我仔细看看原作,但愿能有所发现。
4)我以前文章中推荐过多次的《电动机的单片机控制》一书对直流电机驱动描述的相
当详细,可唯独没有阐述如何确定 PWM 的频率,只是留了一道思考题:
“ 4、PWM 频率如何选择?”(摘自书中 P149 *4)。
郁闷!是否此问题简单到不用描述了?!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




