
资料下载


×
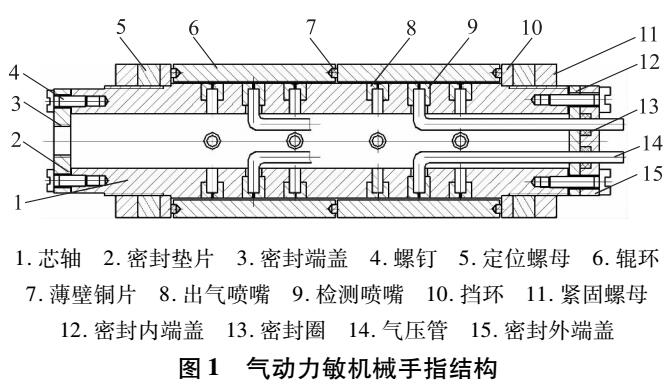
气动力敏机械手指测力系统性能分析
消耗积分:2 |
格式:rar |
大小:0.68 MB |
2018-03-15
分享资料个
机械手的软抓取功能是指机械手能够根据被抓取工件的形状、质量等因素,采取合适的抓取力,在使被抓取工件尽可能变形小的情况下将工件抓起,因此,就需要机械手能够自动感知抓取力的大小。气动力敏机械手指测力系统是在线实时检测气动力敏机械手指与工件接触力的大小,接触力信号经过控制单元处理后传送给驱动单元进行输出力伺服控制,进而实现气动力敏机械手指能够对易碎、易变形工件进行无损伤的抓取。为此就需要测力系统在抓取工作的过程中满足一定的动态性能指标。如果测力系统稳定性差、对接触力输入信号响应缓慢,则会导致驱动单元输出抓取力波动,引起气动力敏机械手指对工件表面造成破坏。相反,测力系统稳定性好,对接触力输入信号响应迅速达到稳定状体,则驱动单元输出的抓取力能得到很好的控制,实现气动力敏手指对工件无损伤的抓取。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






