
资料下载


PID的具体应用详细资料说明
分享资料个
经常有人问有关PID的用法,看-些有关单片及应用的书上都有关于PID的应用原理,但是面对具体的问题就不知道如何应用了,主要的问题是里面所用到的参数以及计算结果需要进行什么处理,通过什么样的换算才能具体的应用于实际,另外在计算方法上也存在着数值计算的算法问题,今天我在这里例举温度控制中的PID部分,希望能够把PID的具体应用说明白。
一般书上提供的计算公式中的几个名词:
1. 直接计算法和增量算法,这里的所谓增量算法就是相对于标准算法的相邻两次运算之差,得到的结果是增量,也就是说,在上-次的控制量的基础上需要增加(负值意味着减少)控制量,例如对于可控硅电机调速系统,就是可控硅的触发相位还需要提前(或迟后)的量,对于温度控制就是需要增加( 或减少)加热比例,根据具体的应用适当选择采用哪一种算法,但基本的控制方法、原理是完全样的,直接计算法得到的是当前需要的控制量,相邻两次控制量的差就是增量;
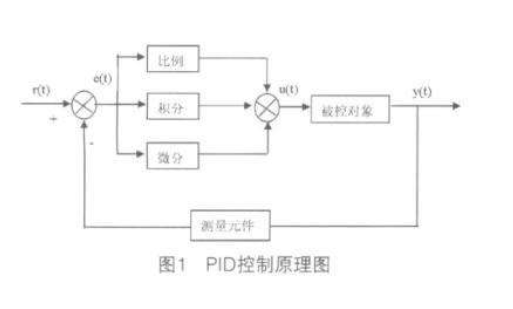
2. 基本偏差e(t)。表示当前测量值与设定目标间的差,设定目标是被减数,结果可以是正或负,正数表示还没有达到,负数表示已经超过了设定值。这是面向比例项用的变动数据。
3. 累计偏差Ze(t)= e(t) + e(t-1)+ e(t-2)+.。. +e(1),这是我们每一次测量到的偏差值的总和,这是代数和,考虑到他的正负符号的运算的,这是面向积分项用的一个变动数据。
4. 基本偏差的相对偏差e(t)-e(t-1), 用本次的基本偏差减去上一次的基本偏差,用于考察当前控制的对象的趋势,作为快速反应的重要依据,这是面向微分项的个变动数据。
5. 三个基本参数: Kp, Ki, Kd这是做好一个控制器的关键常数,分别称为比例常数、积分常数和微分常数,不同的控制对象他们儒要选择不同的数值,还需要经过现场调试才能获得较好的效果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



