
资料下载


PIC单片机的自举程序详细资料说明
分享资料个
dsPIC30F/33F和PIC24H/24F器件的自举程序用于将您的应用程序加载到目标器件上并使程序在器件上运行。自举程序包含以下两个应用程序:
●目标端自举程序,必须在运行自举程序之前将其编
写到dsPIC30F/33F或PIC24F/24H器件的程序存储器中。
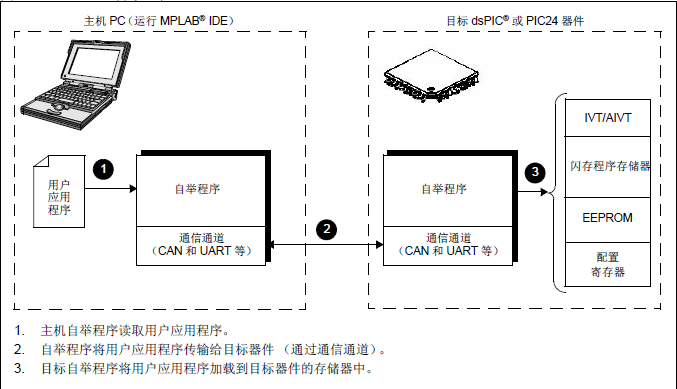
●主机PC自举程序,与目标端自举程序进行通信。自举程序解析HEX文件格式的程序,然后通过通信通道(UART和CAN等)将解析后的文件复制到目标器件上:相应的程序存储器和EEPROM存储器(如果存在)中。图1演示了此过程。
目标端自举程序位于程序存储器的特定区域中,其起始地址为0x100 (对于dsPIC30F器件)或0x400 (对于所有其他系列器件)。一旦启动,该自举程序将对程序存储器地址单元0x600 (对于dsPIC30F系列)或0xC00(对于所有其他系列器件)进行读操作,以读取其中的自举程序延时值。如果该自举程序未能在该延时值指定的期限内检测到UART活动,它将自动暂停并将执行权转交给位于程序存储器地址单元0x602 (对于dsPIC30F系列)或0xC02 (对于所有其他系列器件)中的用户应用程序。但如果该自举程序在自动暂停之前检测到UART活动,则它将使用通过UART接口从主机自举程序接收到的数据来编程EEPROM (如果存在)和程序存储器。
主机自举程序解析包含用户应用程序的HEX文件(由MPL AB&IDE生成),并将解析后的数据通过UART发送给目标自举程序。主机自举程序还支持其他功能,例如,对程序存储器和EEPROM存储器进行读操作。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




