简述面结构光成像
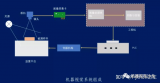
机器视觉系统组成 3D相机与2D相机的区别

如何利用3D点编码提升PETRV1/V2及StreamPETR性能
国内首个工业级精迅V1单目/双目结构光3d重建软件使用场景

基于HCG-VCSEL的偏振结构光3D相机技术分析

如何利用3D激光轮廓传感器实现硅片位置度(搭边)检测

2100万像素相机案例分享:PCB的Pin正位度

线激光3d相机原理是什么

基于机器视觉的比亚迪电池焊后3D视觉检测方法
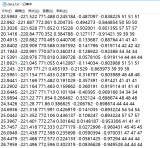
3D相机点云数据“如何读取”
3D相机的工作原理和技术参数

基于单光子探测技术的3DToF深度传感器—VI4331
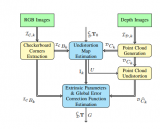
深度相机是如何标定的?
线激光锂电池侧缝焊接质量检测要求
基于3D视觉系统打造的机床上下料柔性化解决方案介绍
利用3D视觉解决螺纹元件复杂表面测量难误差大的问题
用i.MX6Q-C核心板搭建3D相机的机器视觉方案

 下载APP
下载APP
 搜索内容
搜索内容
