

具身机器人走得稳不稳?它可以说了算!
不懂底层协议?ZMC系列主站控制器让你轻松驾驭EtherCAT
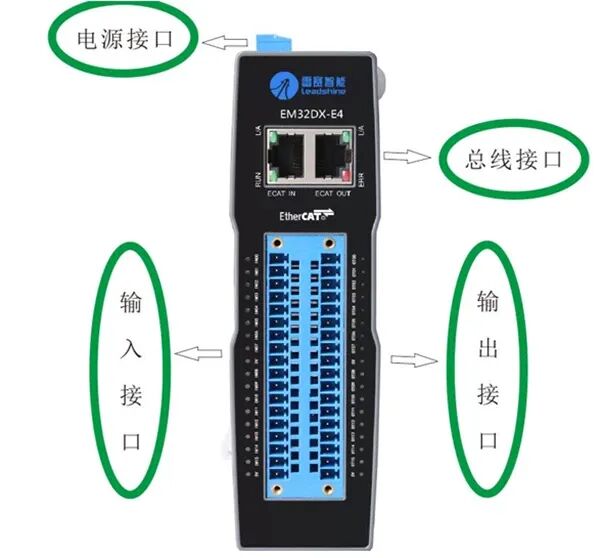
【睿擎派】EtherCAT总线之IO模块读写
如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?
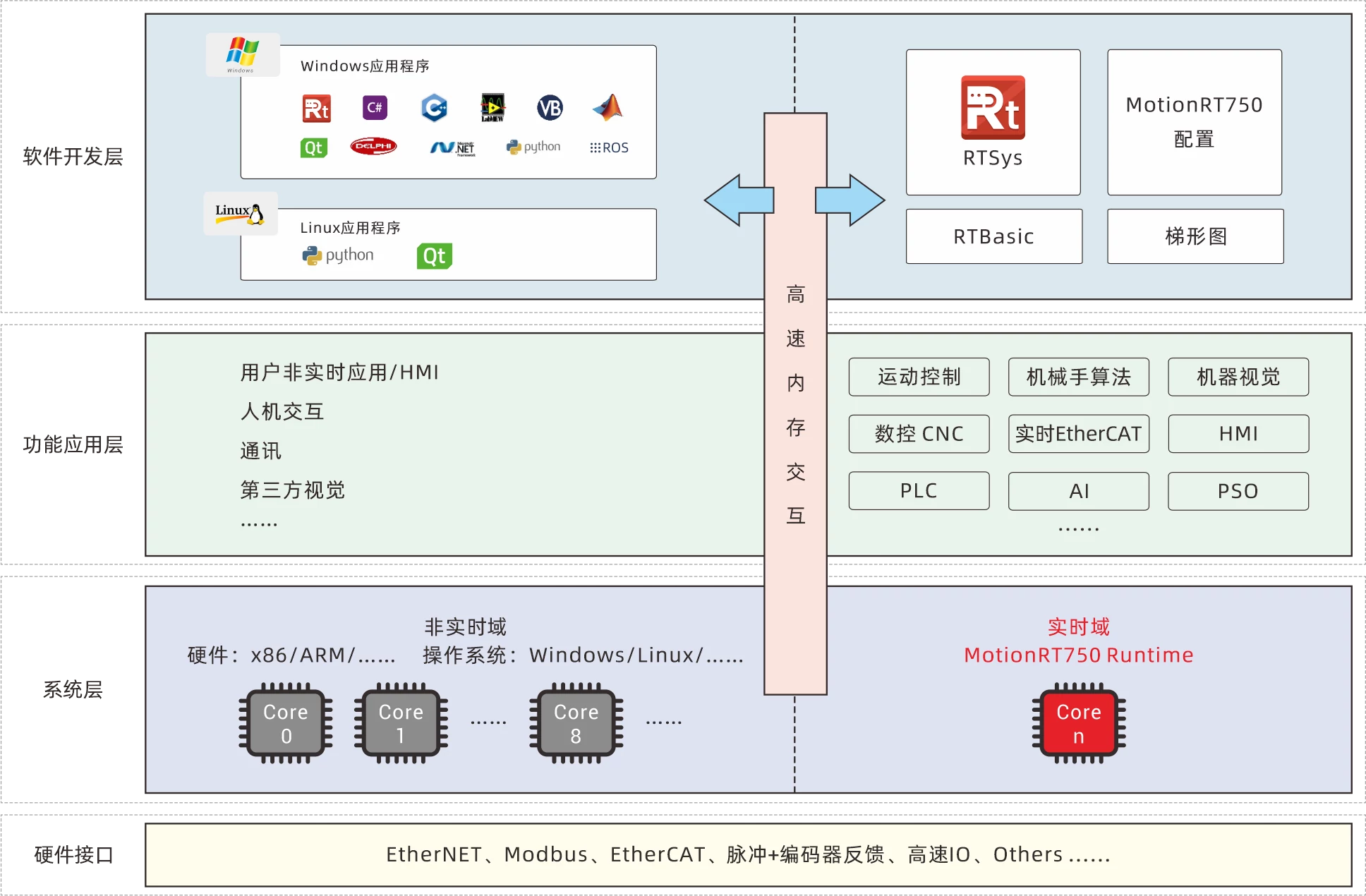
PC强实时运动控制(一):C#的EtherCAT总线初始化(上)
四合一DPort-ECT:EtherCAT开发“即插即用”

瑞萨RZ/T2H平台多核异构的应用场景分析

先楫解决方案 | 变频器EtherCAT通讯卡+远程IO方案

【技术分享】RK3588如何搭建xenomai3+ethercat

人形机器人开发加速器:EC-Engineer Web + Jetson AGX Orin 的远程诊断新玩法
i.MX RT1180实现EtherCAT+伺服控制的终极实践
开发者分享 | HPM5E-EC-DEV:基于HPM5E00的EtherCAT开发板分享
EtherCAT热插拔技术:提升工业自动化系统灵活性的关键
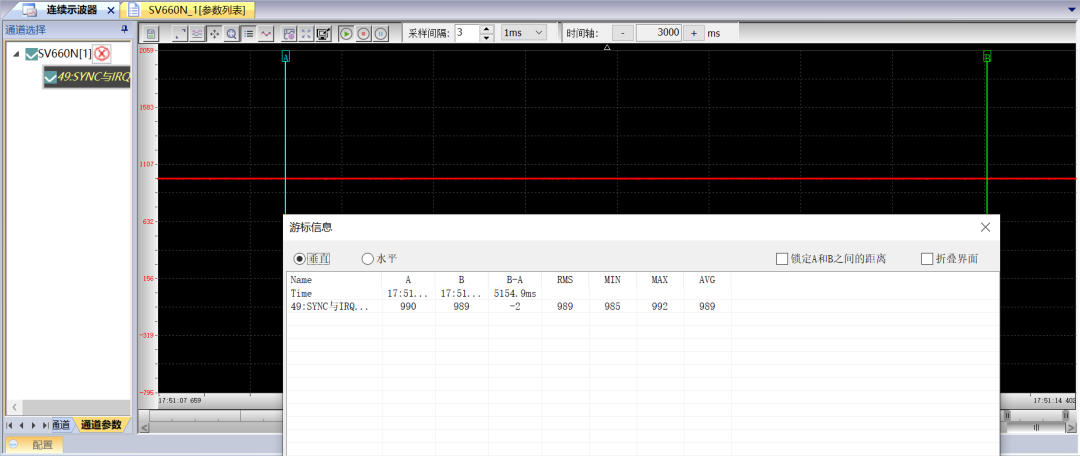
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析

工业网口防护方案:EtherCAT 协议的静电浪涌防护设计

新能源产线中,发那科机器人通过协议转换网关与EtherCAT运动控制卡协同作业实例
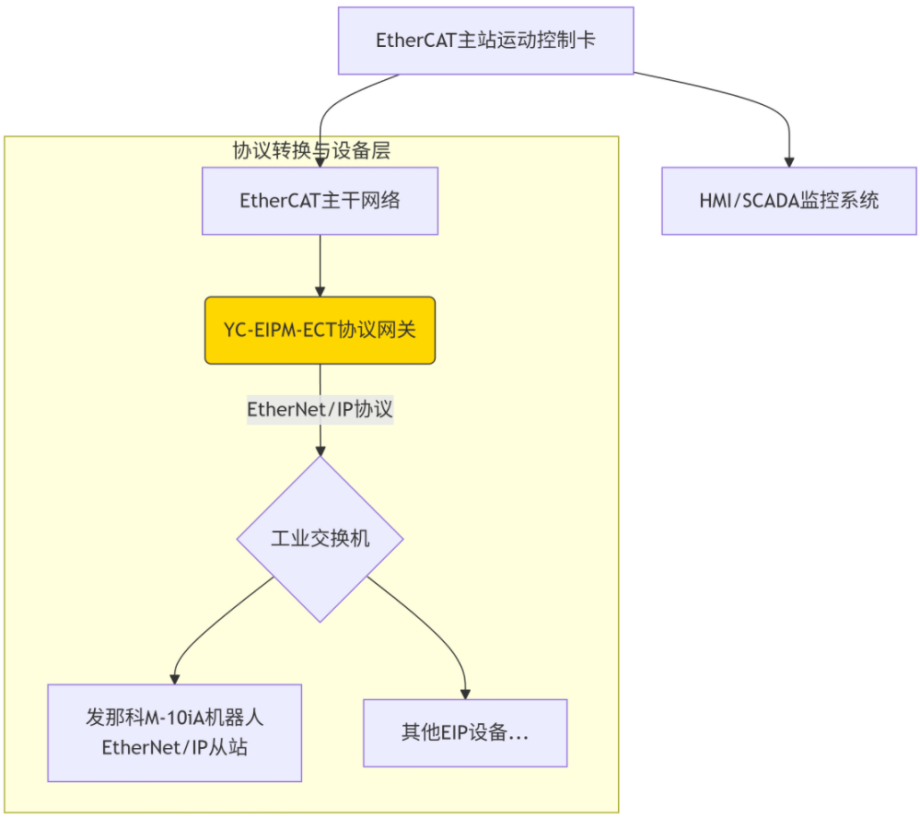
发那科机器人借助EtherNet/IP转EtherCAT网关,实现与EtherCAT运动卡的高效互联案例

如何实现EtherCAT与电机控制之间的同步处理
恩智浦i.MX RT1180跨界MCU驱动EtherCAT的工作流程
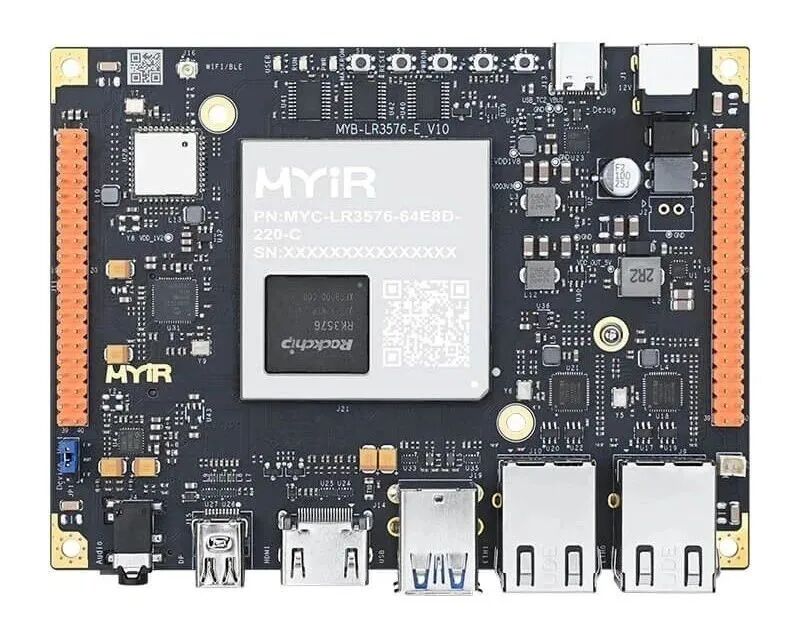
如何移植EtherCAT Igh--基于米尔RK3576开发板

 下载APP
下载APP
 搜索内容
搜索内容
