

IMU P/N 616-4042在卡特彼勒装载机与挖掘机中的精准运动控制与可靠性实践

IMU P/N 596-7347在卡特彼勒挖掘机、装载机与物料操作机中的精准运动监测应用解析

IMU P/N 563-0598在卡特彼勒物料操作机、挖掘机、平地机与重卡中的精准运动监测与应用解析

IMU P/N 470-4959在卡特彼勒挖掘机和平地机坡度控制中的应用
LSM6DSV32X:高性能6轴IMU,赋能下一代智能运动感知应用
LSM6DSV320X:面向高端应用的智能6轴惯性测量单元
ISM330BX:高性能6轴IMU,赋能下一代智能运动感知与AI应用

STEVAL-MKI251A适配器板技术解析与应用指南
STEVAL-MKI247A适配器板技术解析与应用指南
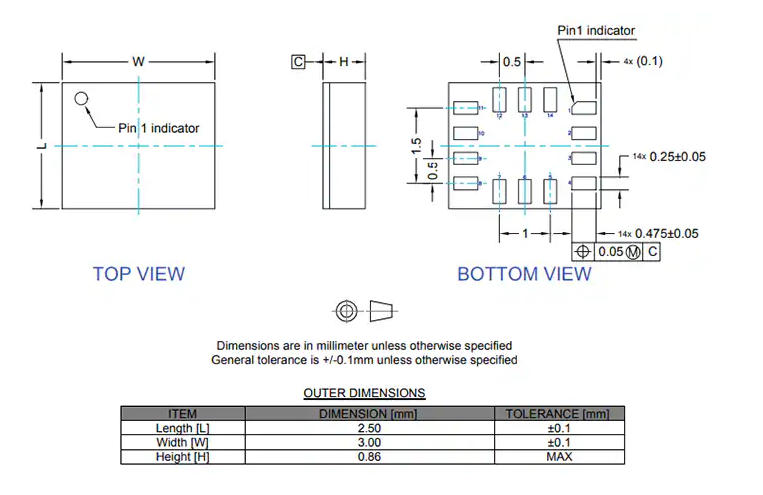
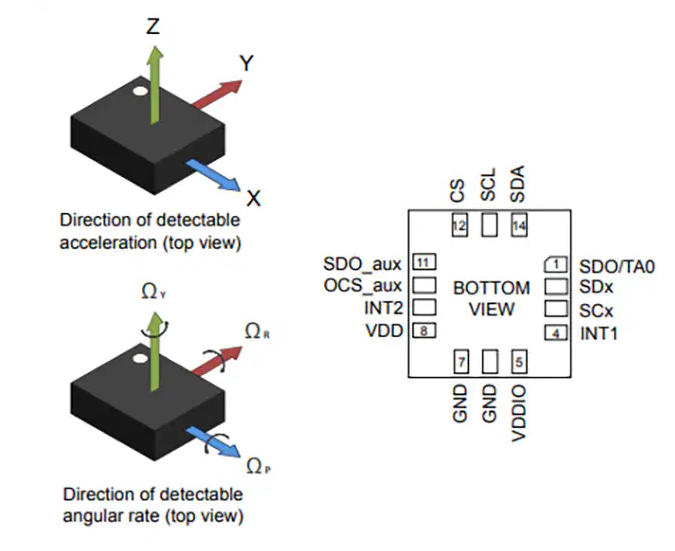
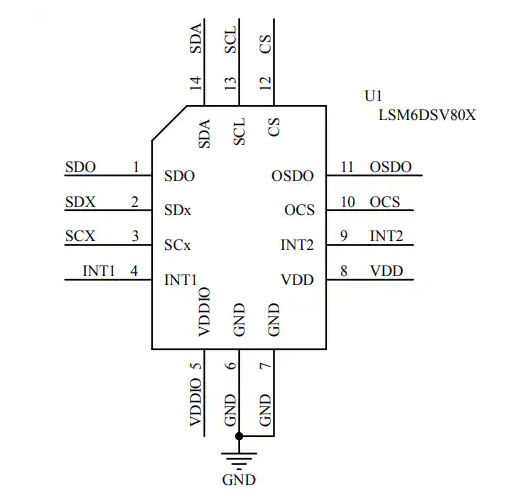
LSM6DSV80X 6轴惯性测量单元技术解析
ISM6HG256X智能惯性测量单元(IMU)技术解析

IMU P/N 333-8538在卡特彼勒挖掘机、自卸车与装载机中的应用价值
IMU P/N312-0755在卡特彼勒挖掘机上的应用实践

ADIX16470 和SCH16T-K10 的参数对比
高精度电子罗盘TCM-XB在消防作业中的应用
优化导航系统中的MEMS IMU数据一致性和时序
小安派BW21-CBV-Kit入门教程之MPU6050 IMU零点检测
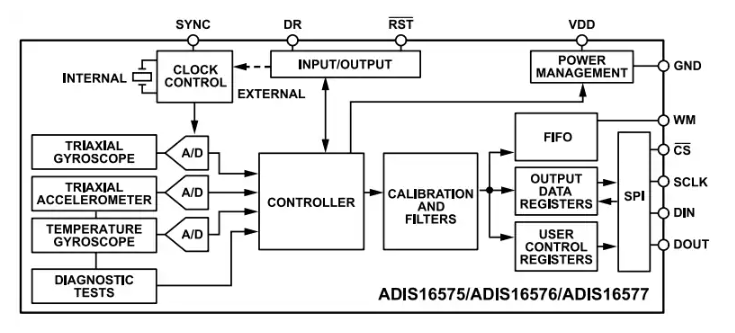
Analog Devices Inc. ADIS1657x精密MEMS IMU模块数据手册
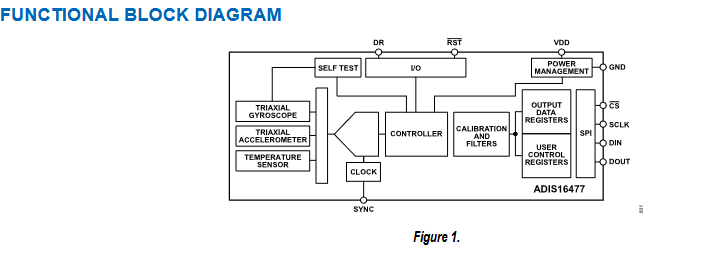
ADIS1647x精密微型工业IMU 数据手册和产品介绍
爱普生M-G370PDT和M-G370PDG稳定云台的理想之选

 下载APP
下载APP
 搜索内容
搜索内容
