

CW32L012对MPU6050的数据进行卡尔曼滤波
CW32L012解算MPU6050姿态数据

CW32L012读取MPU6050姿态数据
小安派BW21-CBV-Kit入门教程之DMP6读取MPU6050数据
mpu6050航向角漂移很严重的原因及解决方法
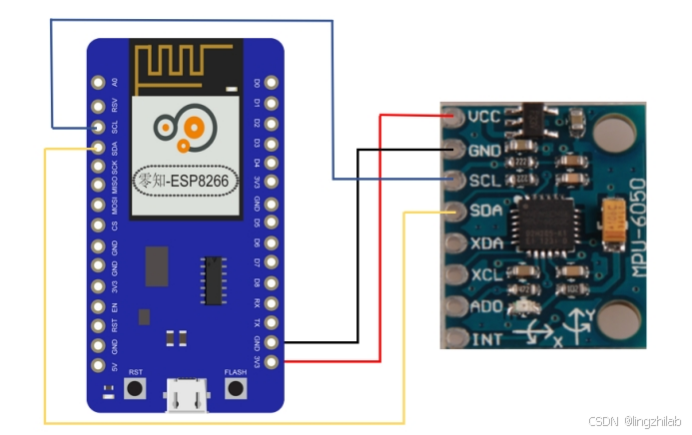
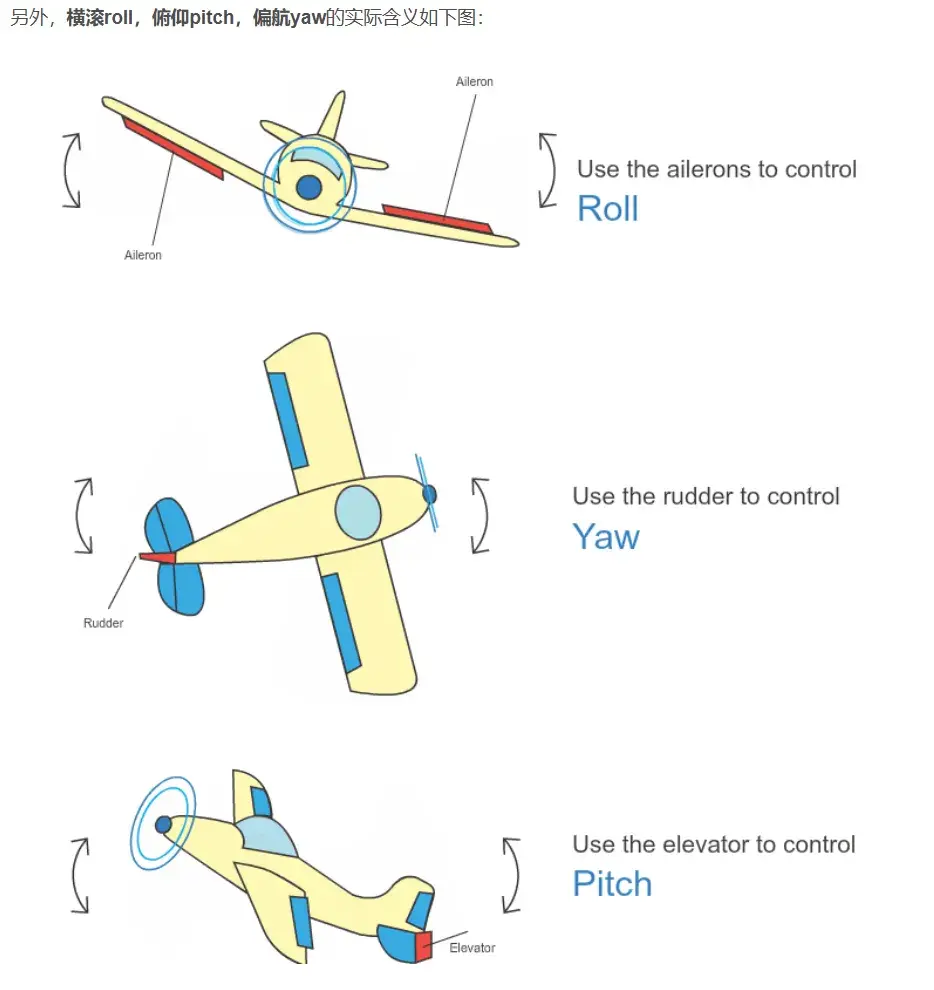
零知开源——ESP8266+MPU6050 实现运动姿态检测

第17章-用6050走直线和转90度功能 平衡车入门---MPU6050陀螺仪的使用 超详细陀螺仪MPU6050模块输出姿态角

第八章V1.5-MPU6050陀螺仪使用方法 MPU6050姿态解算dmp MPU6050姿态解算STM32
ADXL345和MPU6050的区别
mpu6050和mpu6500哪个性能好
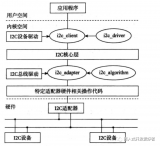
Linux内核中描述I2C的四个核心结构体

小熊派Hi3861获取mpu6050数据在oled屏幕中显示
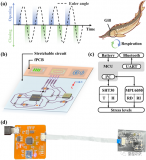
开发一种高集成度、低成本的活鱼可穿戴电子系统
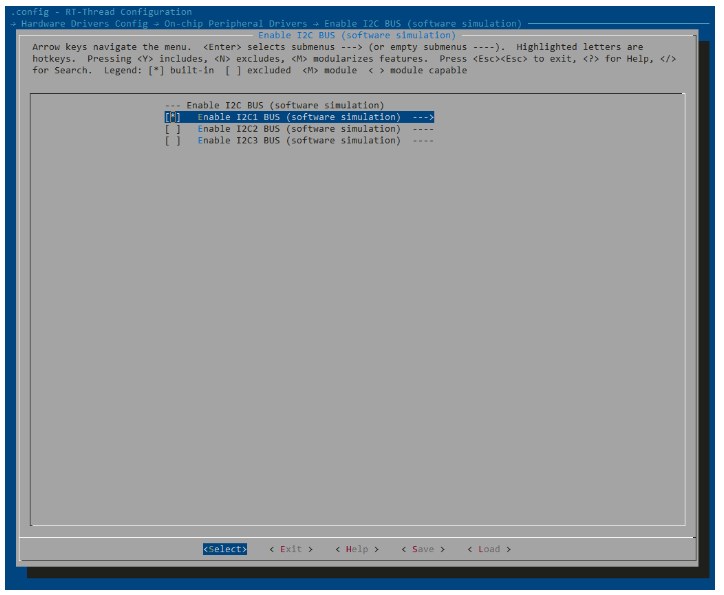
请问ARTPI是怎样使用软件I2C读取mpu6050的?
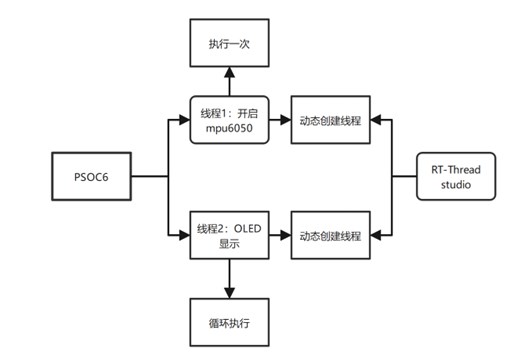
基于RT-thread和Psoc6实现的多线程mpu6050读取及显示
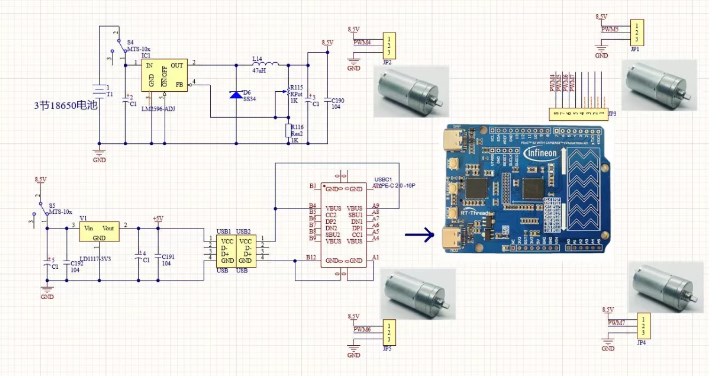
基于PSOC6开发板构建的智能小车
MPU6050六轴传感器模块初始化教程

ch347连接mpu6050模块的方法

使用第三方开源库驱动MPU6050模块
利用Cordic算法来进行姿态解算

 下载APP
下载APP
 搜索内容
搜索内容
