
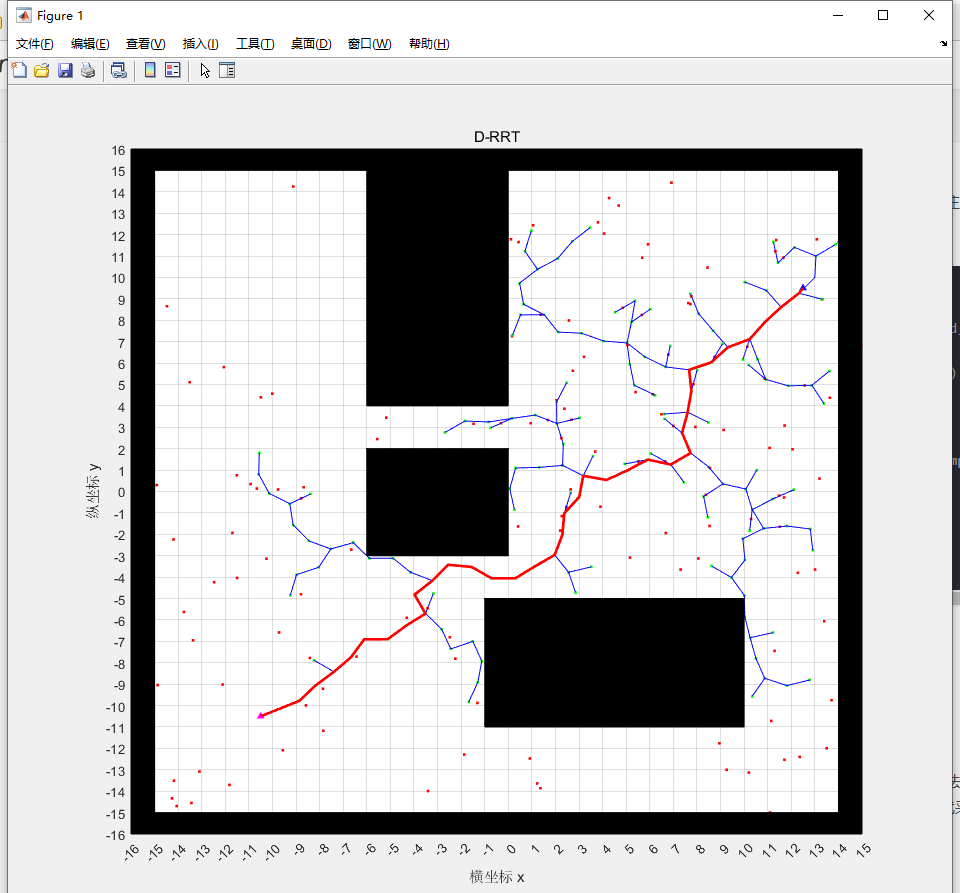
自主机器人近距离操作运动路径规划算法
Matlab中如何绘制最优路径
RRT算法Matlab实现 主函数部分
如何编写RRT算法 初始化参数设置
全局路径规划RRT算法原理
机器人路径基于采样的规划

自动驾驶 RRT算法原理解析

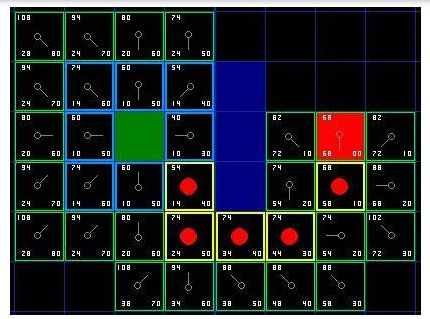
ROS平台下三种常用的自主探索算法原理
决策规划系列:运动规划常用算法
一文解读无人驾驶全局路径规划 - RRT算法原理
全局路径规划-RRT算法原理及实现

 下载APP
下载APP
 搜索内容
搜索内容
