
坐标系在动态SLAM中究竟有多重要?
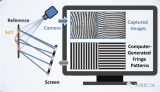
工业上常见的高精度主动式重建算法
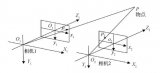
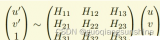
三维视觉测量技术:被动视觉测量和主动视觉测量

移动机器人的组成和操作方法
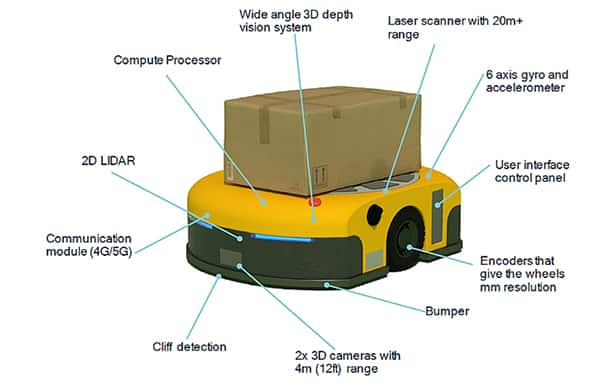
如何优化内部物流以简化和加速工业 4.0 供应链运行 - 第 2/2 部分

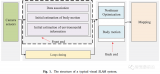
基于深度学习的LiDAR SLAM框架(DeepPointMap)

ORB-SLAM3整体结构框架分析

NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!

单目深度估计开源方案分享
SuperPoint语义 SLAM深度学习用于特征提取

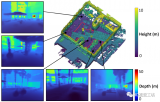
室内环境大规模雷达SLAM具体原理是什么?

怎么去处理视觉SLAM长期定位中的外观变化和轨迹漂移呢?
基于视觉SLAM的研究现状

一种基于RGB-D图像序列的协同隐式神经同步定位与建图(SLAM)系统

视觉SLAM开源算法ORB-SLAM3原理与代码解析
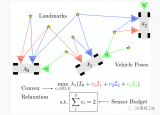
基于OASIS的移动机器人上传感器布置优化方案
基于NeRF的实时激光雷达SLAM算法

探讨目前主流3D激光SLAM算法方案

机器人移动过程中基于概率模型的SLAM方法

深度解析自动驾驶中的BEV和SLAM技术

 下载APP
下载APP
 搜索内容
搜索内容
