

IMU/GNSS与车体外参标定

LOAM源代码中坐标变换部分的详细讲解
SLAM领域中的VIO(视觉惯性里程计)
不同3D激光SLAM方案对比分析

几款好用的可视化工具推荐
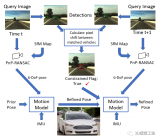
如何利用动态车辆施加的运动约束改进视觉定位?

学会面向对象编程封装IMU驱动
学会安装第三方开源库

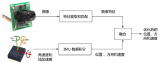
INS322-2B工业级组合导航定位系统优势特点

校准多个惯性测量单元(IMU)和各个轴的外参
从惯导系统到相对论

介绍主流的VIO初始化方案
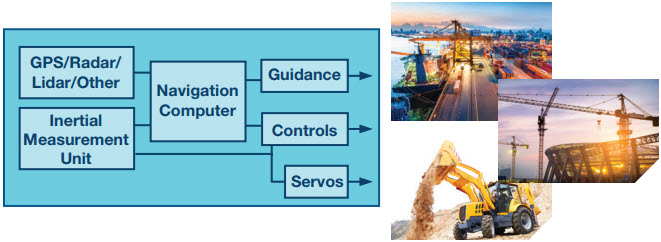
高性能惯性检测解决方案 助力自主式机器应用
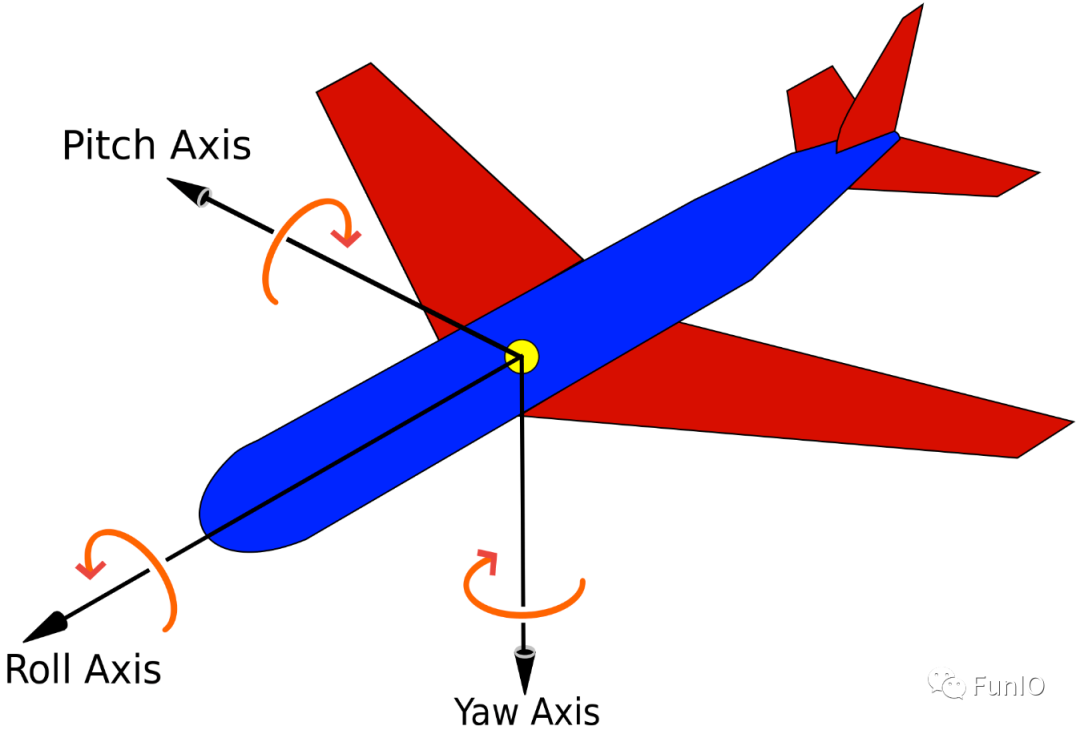
飞行器姿态计算
详解激光SLAM框架LeGO-LOAM

在城市地区使用低等级IMU的单目视觉惯性车轮里程计

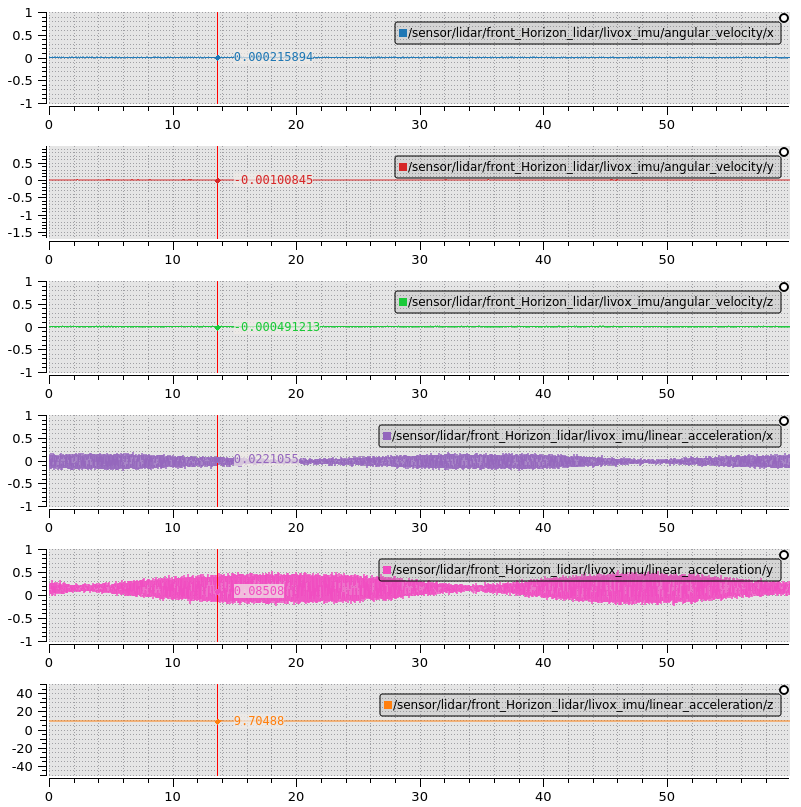
IMU测量原理与标定算法的实现
Wheel-SLAM:低成本轮式IMU的SLAM系统

一种易于实现的无外部设备IMU校准方法
激光点云感知三维空间介绍

 下载APP
下载APP
 搜索内容
搜索内容
