
资料下载


×
AIWM六足机器人控制板开源
消耗积分:0 |
格式:zip |
大小:0.03 MB |
2022-07-27
岳臻俊
分享资料个
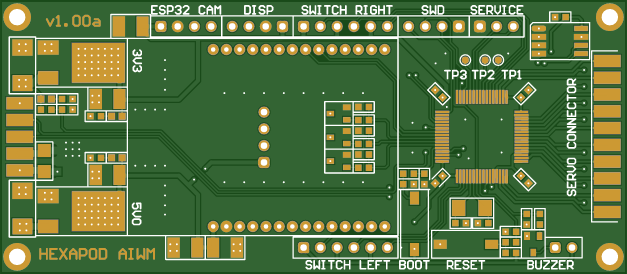
PCB图如下: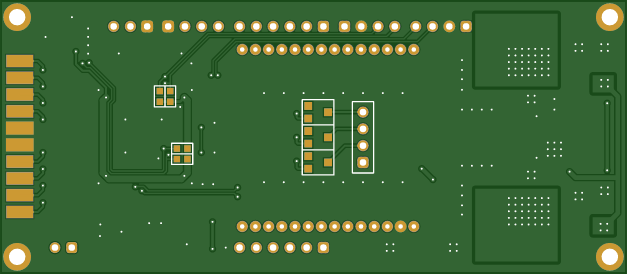

描述
AIWM六足控制板
这是AIWM六足机器人的控制板。基于STM32F373微控制器的板子,可以使用WIFI-UART桥(HLK-RM04)进行通信。最大输入电压小于 20V 否则我们会得到直流稳压器的高温。
您可以在 GitHub 项目页面上获取有关此项目的更多信息:https ://github.com/NeoProg2013/AIWM_hexapod/tree/v1.00
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






