
资料下载


Humaniod AI会说话的机器人与Arduino
张敏
分享资料个
描述
让我们制作一个简单的机器人,它可以通过 android 应用程序根据您的语音命令与您交谈并移动。这个机器人还可以根据应用程序中内置的问题答案对一些问题给出简单的答案。您也可以使用这个机器人的谷歌助手来让更多精彩。
步骤1:
我们需要的材料
- Arduino pro mini/Arduino 微型
- 放大电路
- 小喇叭
- 5伺服
- 2 颗
- 2个可以连接到伺服的轮子
额外的材料和工具
- 热胶枪
- 几颗螺丝
- 一个长方形盒子
- 迷你钻打孔
- 小电池
第 2 步:我们需要的软件
- 麻省理工应用发明者
- Arduino IDE
第 3 步:使伺服电机连续旋转
伺服从 0 度扫描到 180 度,我们的机器人轮使用伺服电机,所以首先我们需要使其连续旋转。(您也可以从市场上购买连续旋转伺服电机跳过这一步。)。
打开后首先打开伺服电机螺丝,您会发现伺服上部有一组齿轮,如图所示。
现在你需要在伺服齿轮上切一个小凹口,如上图所示。这个凹口防止伺服在 180 度后进一步移动。现在你需要将伺服电机电路内的电位器固定在 0度位置只需涂抹一些 feviquick 或其他类似的粘合剂。
如果你想获得它的详细文档,只需谷歌它
如何制作一个连续旋转的伺服电机你会得到很多关于这个过程的说明链接。
第 4 步:制作机器人的身体
现在我们需要制作机器人的身体。
为了制作机器人的身体,我们需要一个如上图所示的矩形框。
N 按照上面的图片制作机器人的身体。
只需打几个孔并固定伺服电机,如上图所示。
第 5 步:
https://github.com/ASHWINISINHA/Artificial-intelli ...
现在从上面的链接下载代码并将其上传到 arduino micro 。
首先打开 Arduino IDE 并粘贴您下载的代码,然后将板更改为 arduini pro mini。
选择arduino的com口并上传。
第 6 步:

将无线蓝牙扬声器连接到机器人背面,如图所示。
接线根据代码将电线连接到arduinio
伺服左右臂-->arduino pin(10, 11)
伺服头--.>arduino 9
蓝牙 hc05
Rx 到 arduino tx
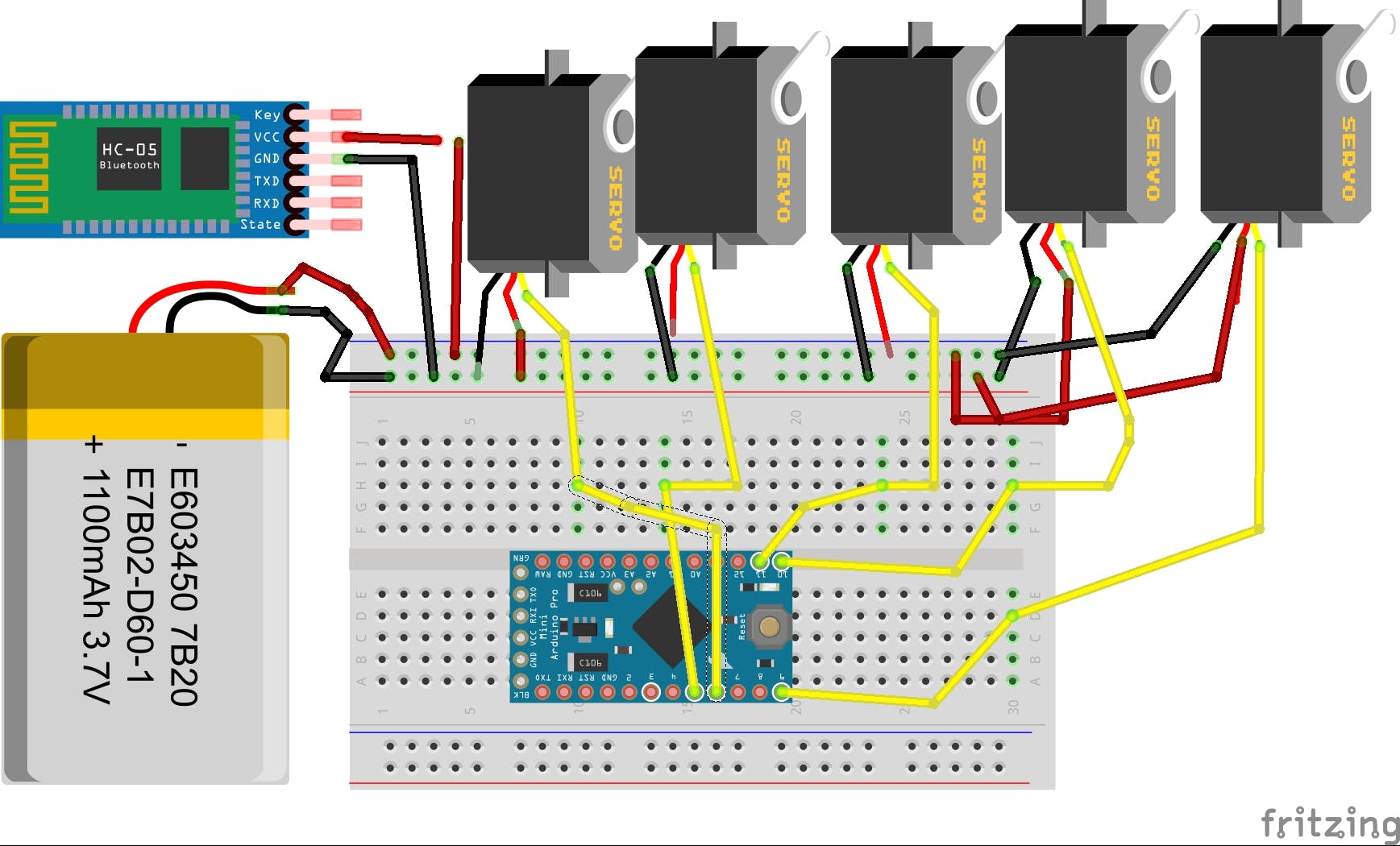
别针
和蓝牙的Tx到rx pin arduino
现在你准备好了
将应用程序连接到arduino的蓝牙
并享受它。
很抱歉在编写教程期间出现任何拼写错误,因为我是新手。希望你喜欢它并投票给我们。
第 7 步:现在您的机器人已准备好迎接您的乐趣。
享受应用程序中的各种预构建命令和问题答案
您还可以通过在 MIT app Inventor 中导入 aia 文件来根据您的需要更改应用程序。
您还可以通过蓝牙对机器人使用谷歌助手。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





