
资料下载


YouBionic机器人与Exo手伺服器开源分享
王斌
分享资料个
描述
构建过程
第 1 步:收集和组装硬件组件
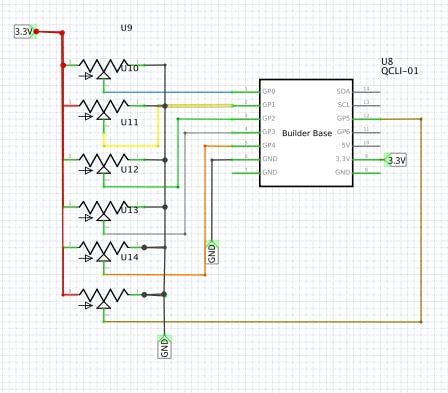
收集上面列出的所有硬件组件,并按照 Ubionic Robot Hand 和 Exo Hand 手册组装组件。要将机器人和 Exo 手伺服器和电位计连接到 Builder 底座,请按照下面的图表和示意图。
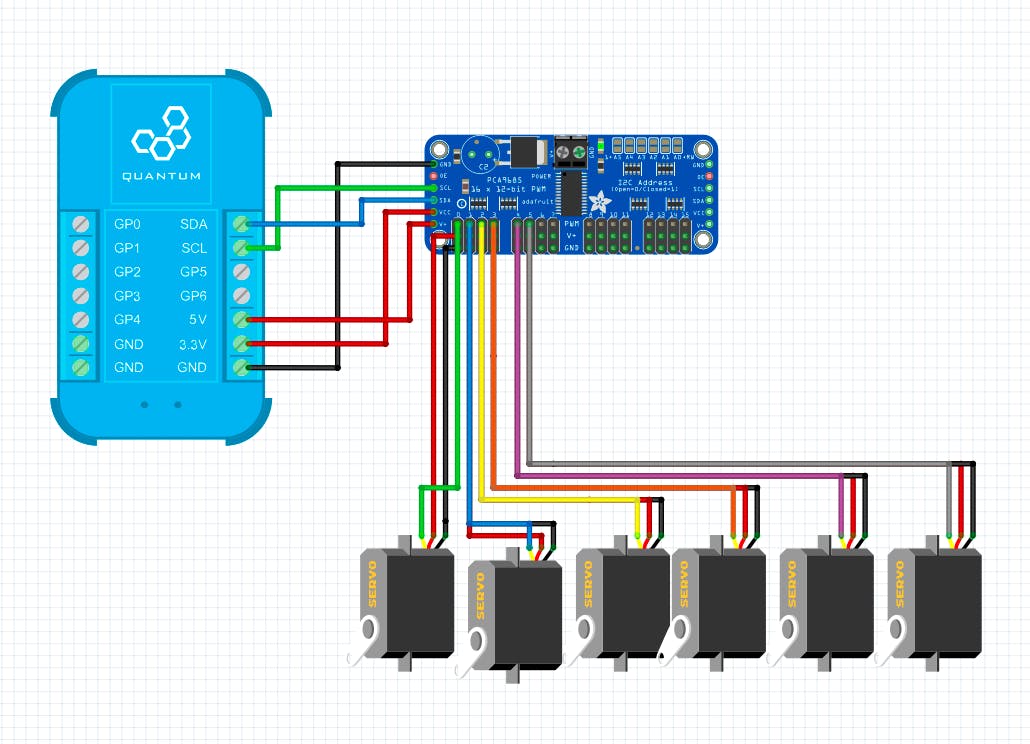
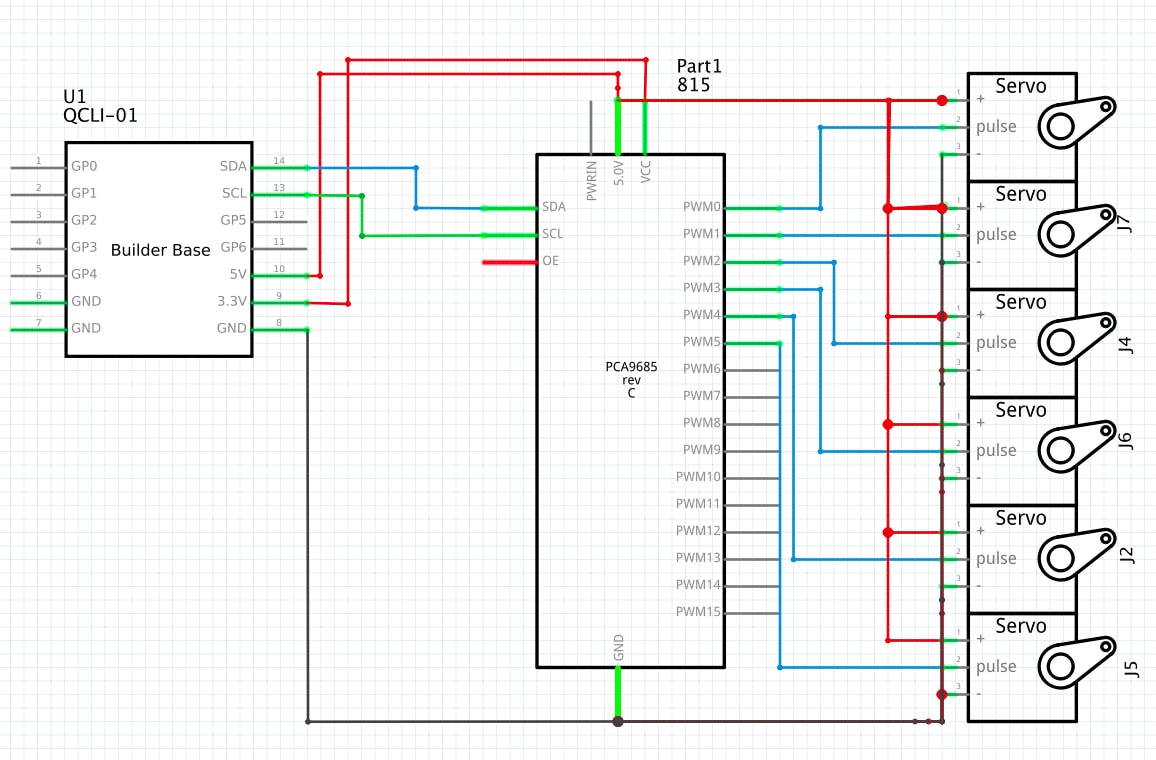
为机器人手伺服接线:
首先将 SDA、SCL、GND、5V 和 3.3V 端口连接到 PCA9685,如图所示。
接下来,如图所示将 PCA9685 连接到伺服系统。
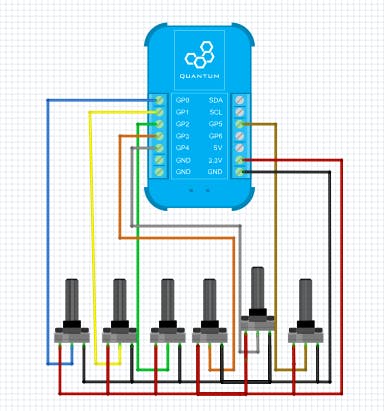
现在,将 Exo-Hand 电位器连接到构建器底座,如下所示:
第 2 步:构建固件
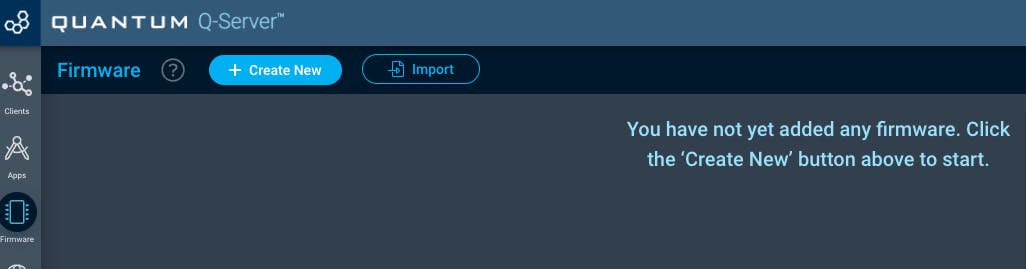
导航到固件生成器并选择屏幕左上角的“+ 创建新”按钮。
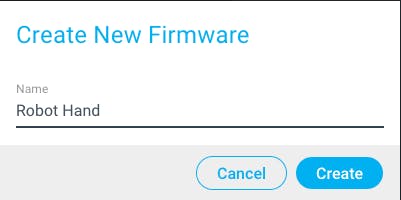
将您的固件命名为“Robot Hand”并点击创建。
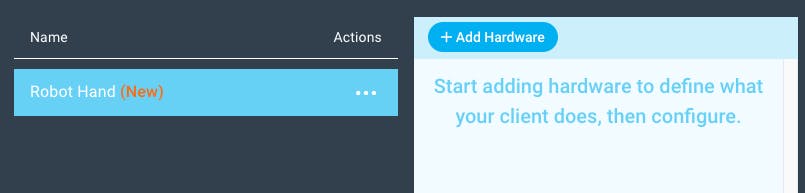
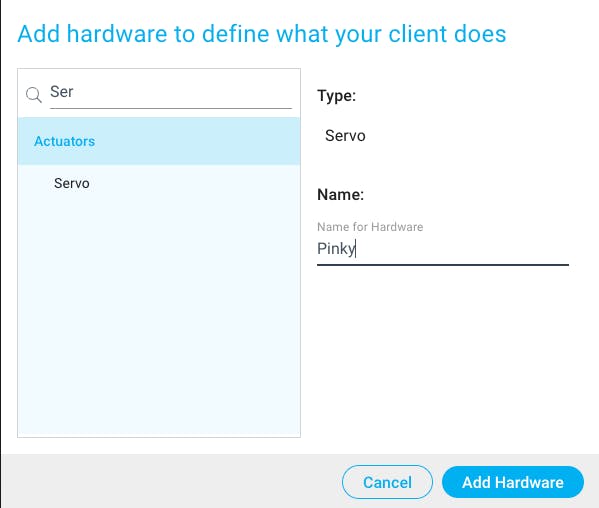
现在,选择“+ 添加硬件”按钮,将伺服设备添加到固件中。将设备命名为 Pinky,然后点击“添加硬件”按钮。
对另外五个伺服器重复这些步骤,将它们命名为:Ring、Middle、Index、Thumb Tip 和 Thumb Base。

在固件中选择 Pinky 设备以扩展配置选项。
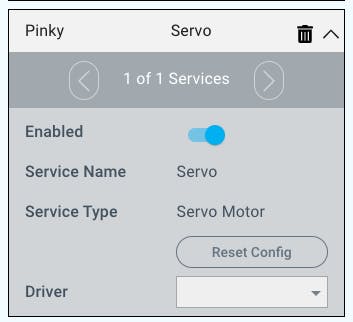
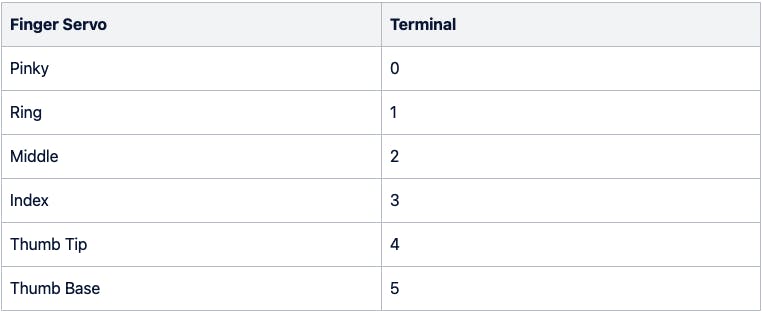
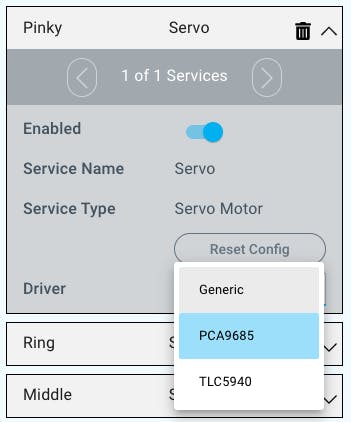
从驱动程序下拉菜单中选择 PCA9685 并进行如下配置:
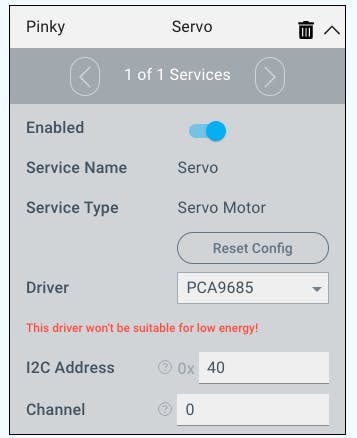
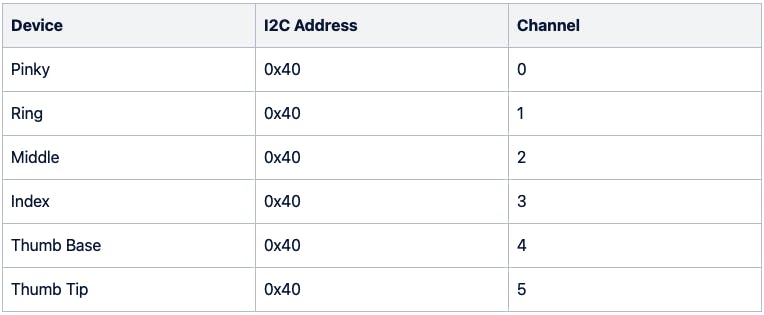
对其余设备重复上述步骤,并根据下表进行配置。如果您已将小指添加到固件文件中,请排除小指。
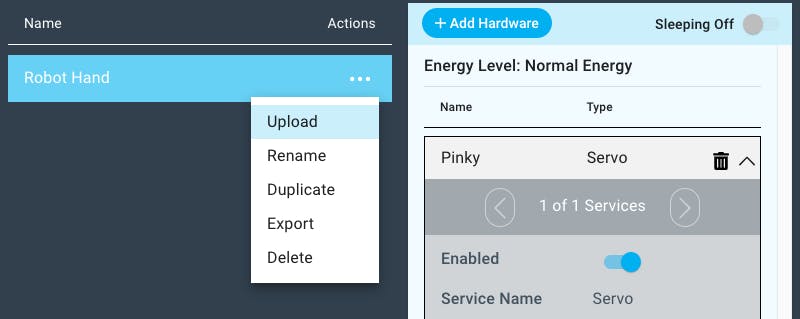
完成设备配置后,保存固件文件并将其上传到连接到机器人手的客户端!

接下来,我们将为您的 ExoHand 构建固件。
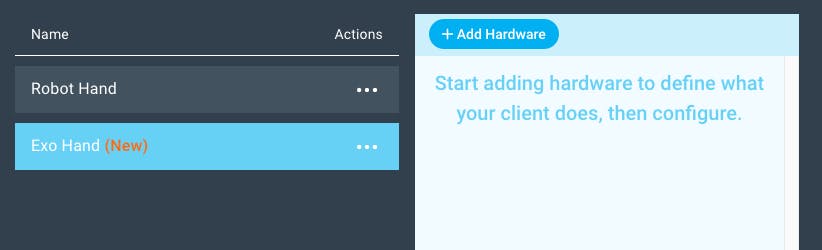
导航到固件生成器并选择屏幕左上角的“+ 创建新”按钮。
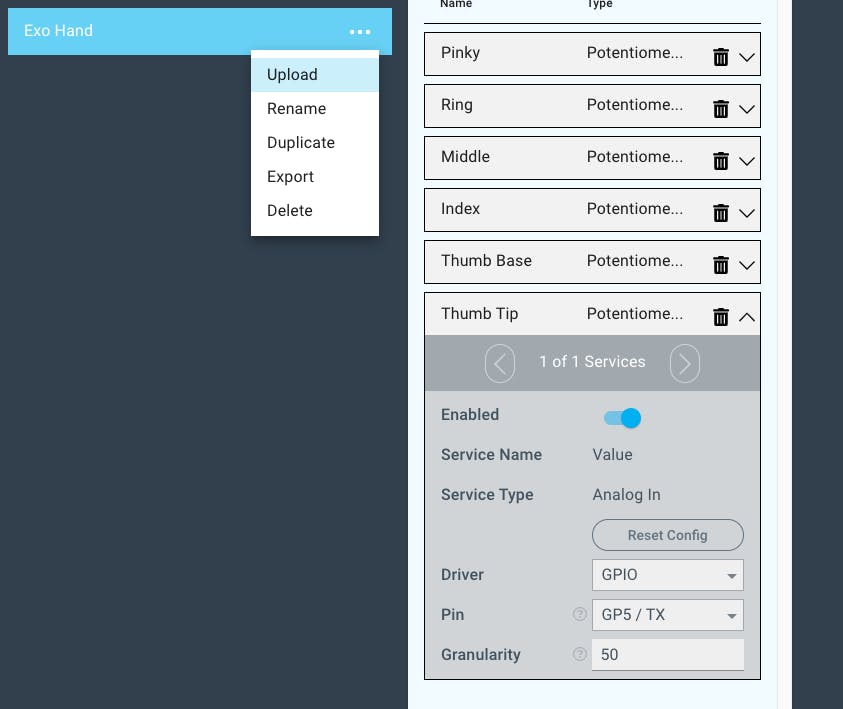
将您的固件命名为“Exo Hand”并点击创建。

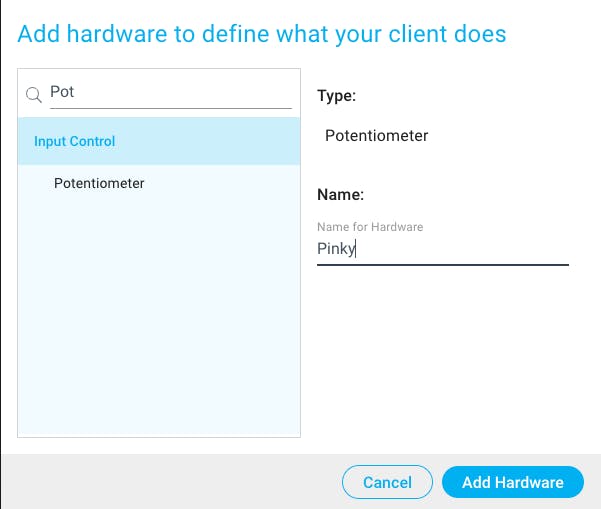
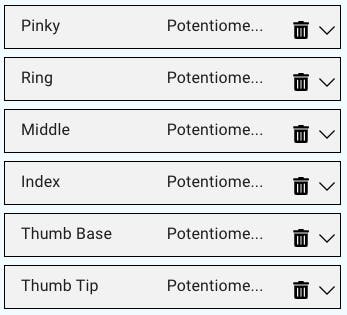
现在,选择“+ 添加硬件”按钮,将电位器设备添加到固件中。将设备命名为 Pinky,然后点击“添加硬件”按钮。
对另外五个电位器重复这些步骤,将它们命名为:Ring、Middle、Index、Thumb Tip 和 Thumb Base。
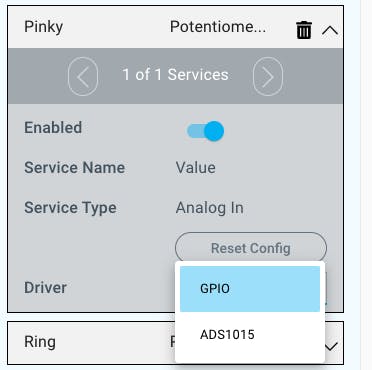
在固件中选择 Pinky 设备以扩展配置选项。
从驱动程序下拉菜单中选择 PCA9865 并进行如下配置:
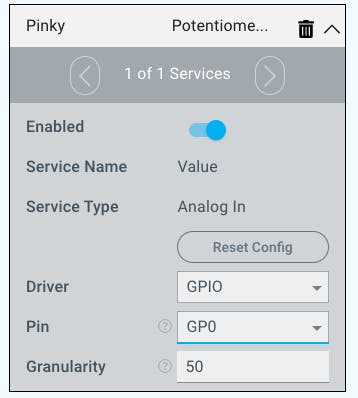
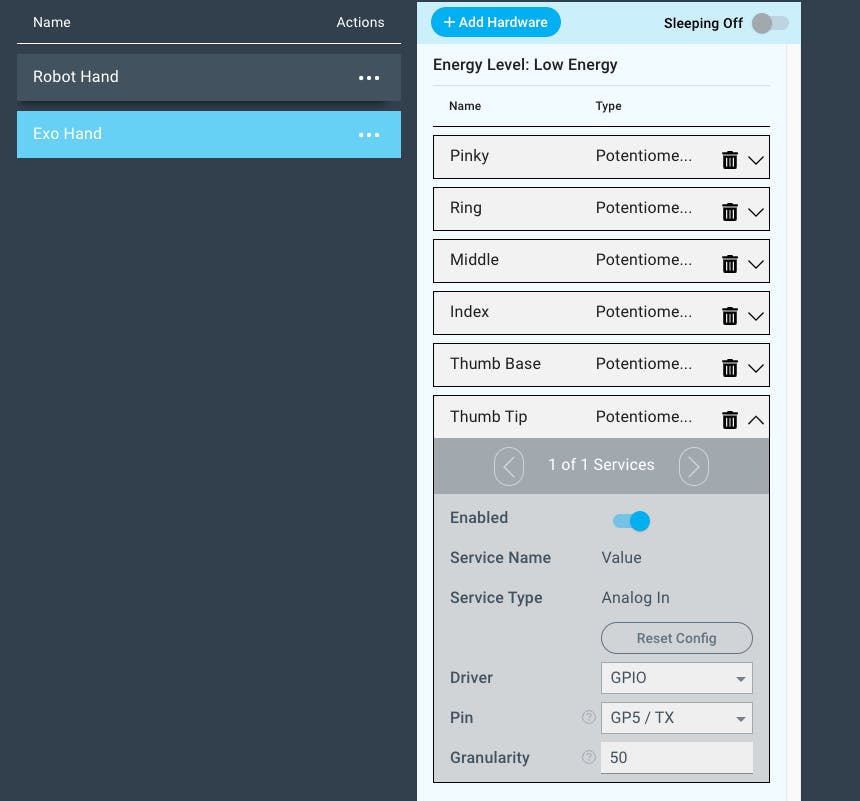
对其余设备重复上述步骤,并根据下表进行配置。

完成设备配置后,保存固件文件并将其上传到连接到 Exo 手的客户端!
第 3 步:获取电位器范围
Exo Hand 的固件上传完成后,导航到服务器上的客户端页面。
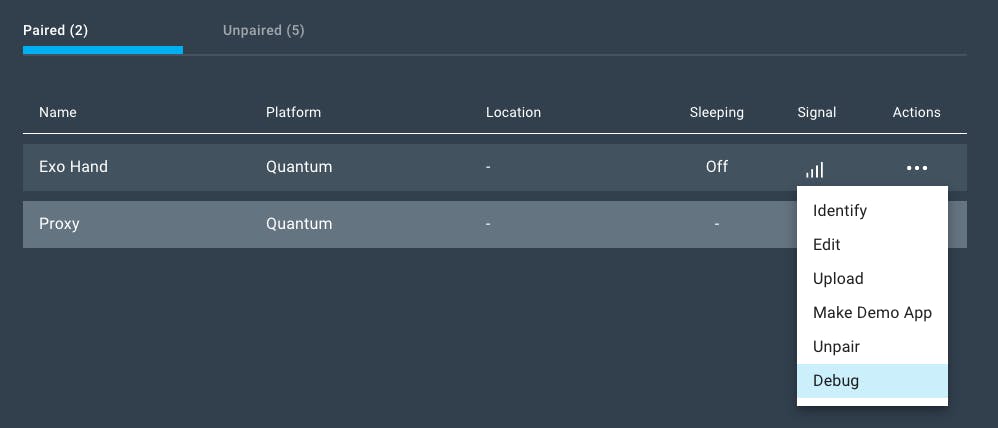
从操作下拉菜单中选择调试操作。
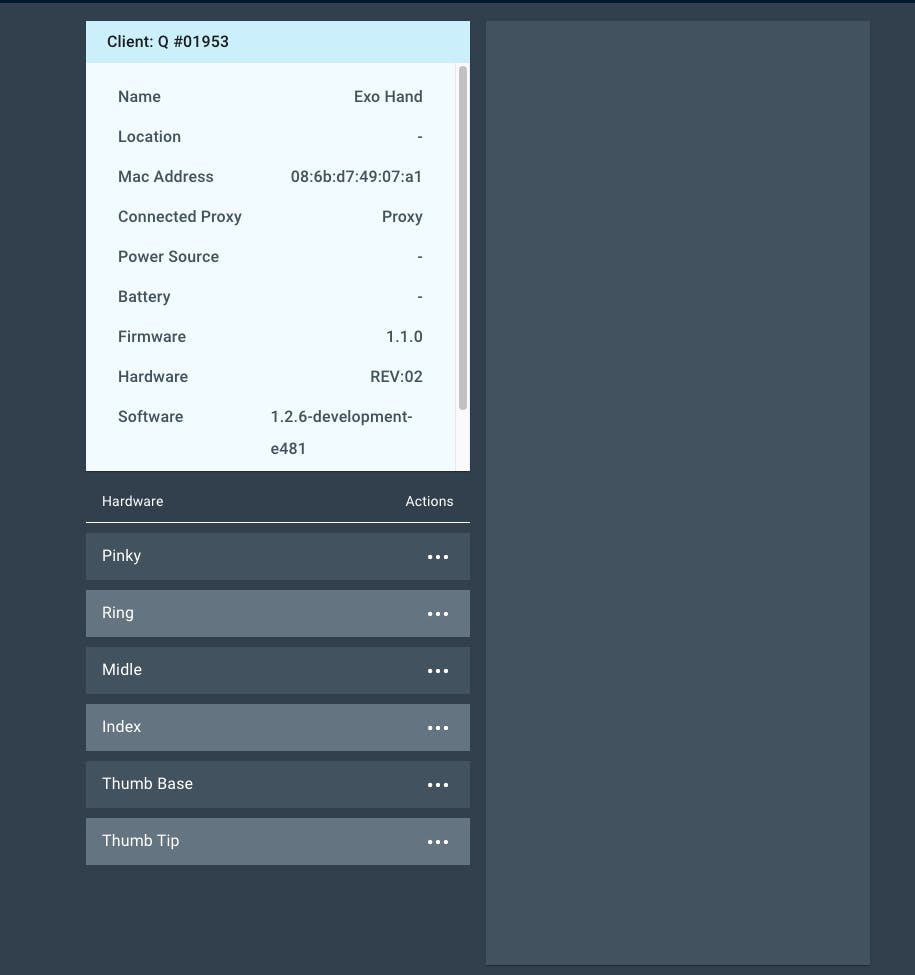
到达此处后,您将读取每个手指在其缩回和伸展位置的电位计读数。
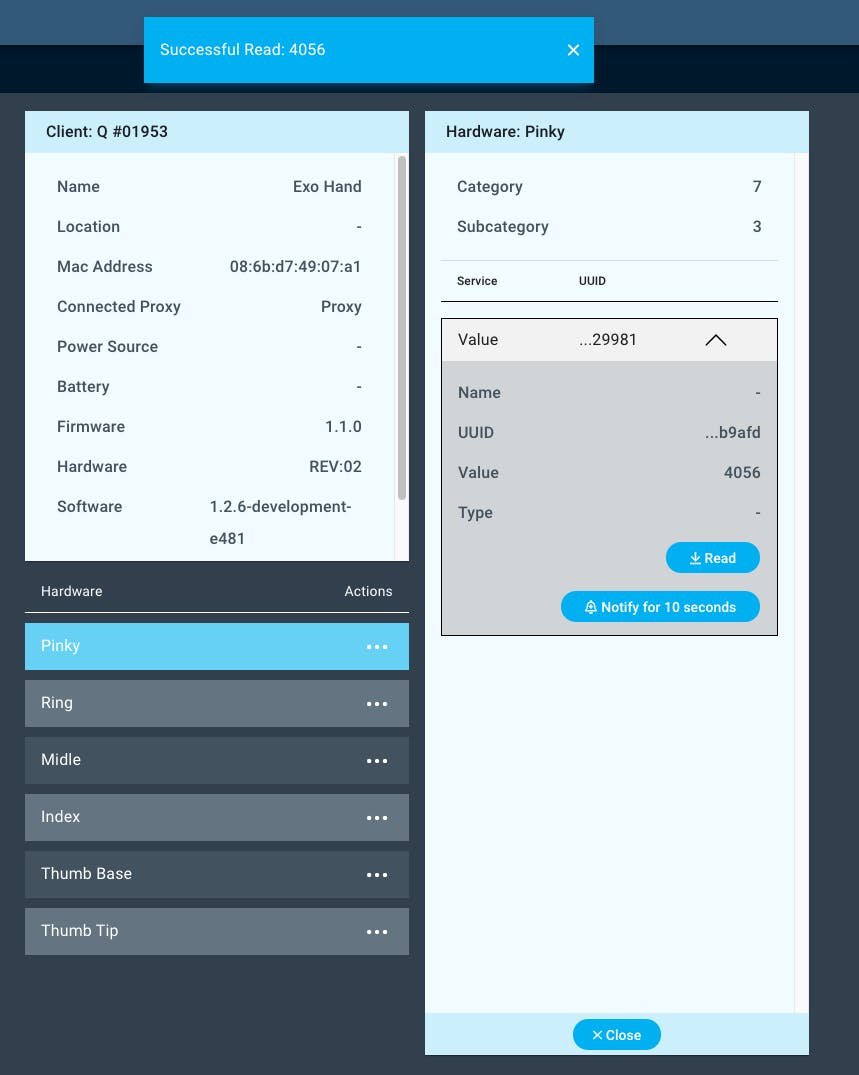
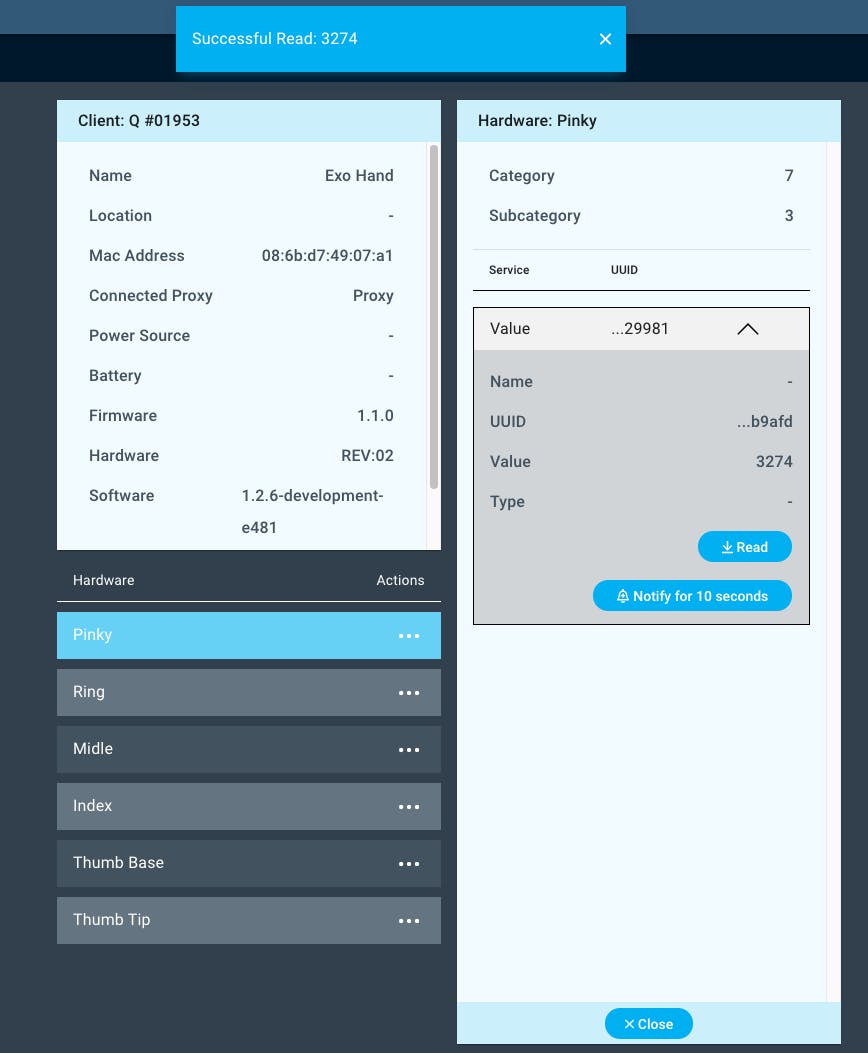
记录每个手指在两个位置的模拟值。我们将在下一步构建应用程序时使用这些值。
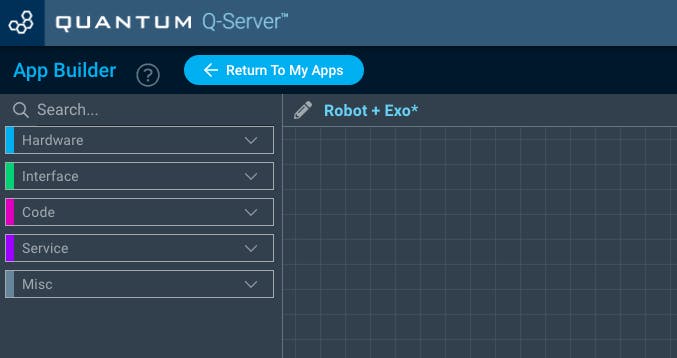
第 4 步:构建应用程序
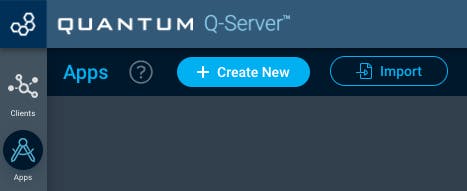
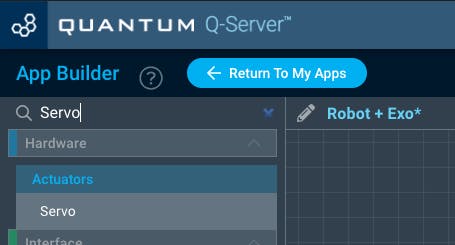
要构建应用程序,您需要导航到应用程序页面并选择“+ Create New”按钮。
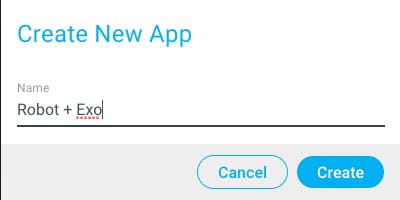
现在,命名您的应用程序并按“创建”按钮。我们将其命名为 Robot + Exo。
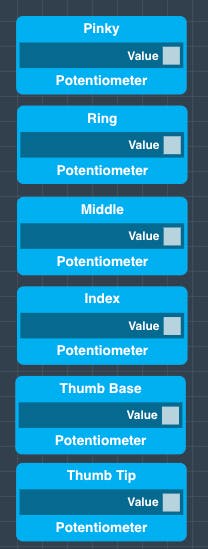
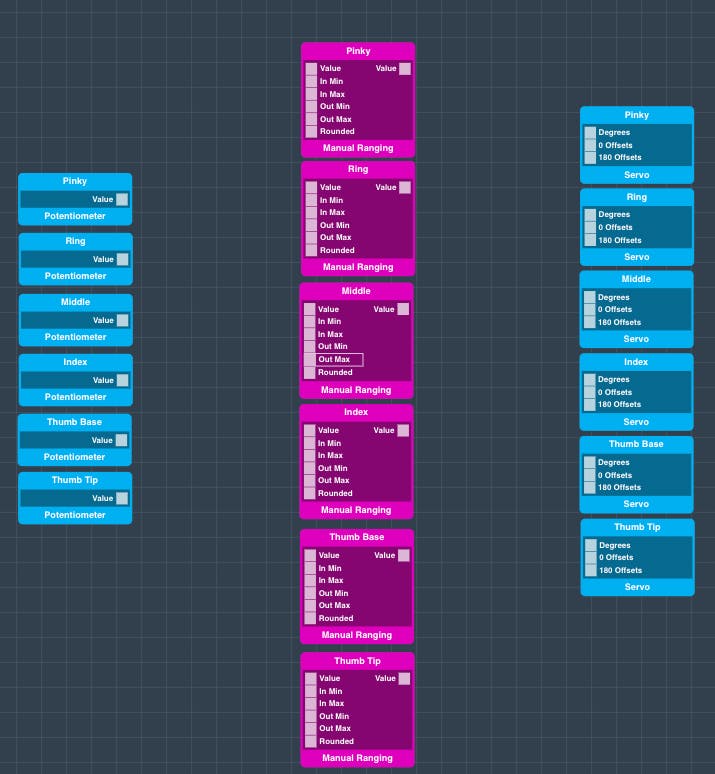
您现在应该位于应用程序构建器画布上。使用画布左上角的搜索栏,找到电位器硬件对象并将其中的 6 个拖到画布上。
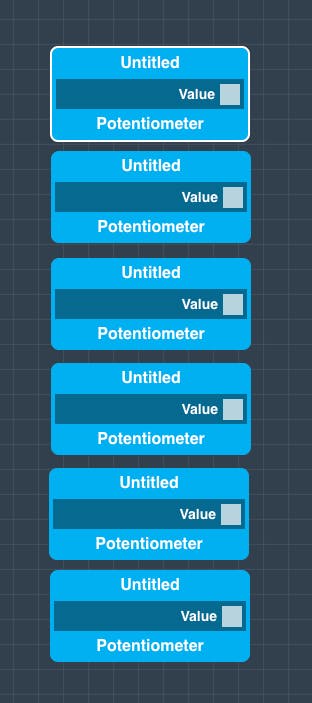
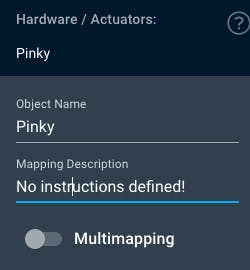
选择顶部的电位器对象,然后导航到屏幕右侧的属性面板。将对象的名称从“Untitled”更改为“Pinky”,然后单击下方的“Save Properties”按钮。

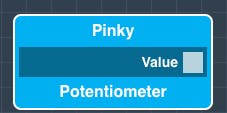
对剩余的电位器对象执行相同的步骤,将它们命名为如下所示:
接下来,搜索 Servo 硬件对象并将其中的六个拖到画布上。
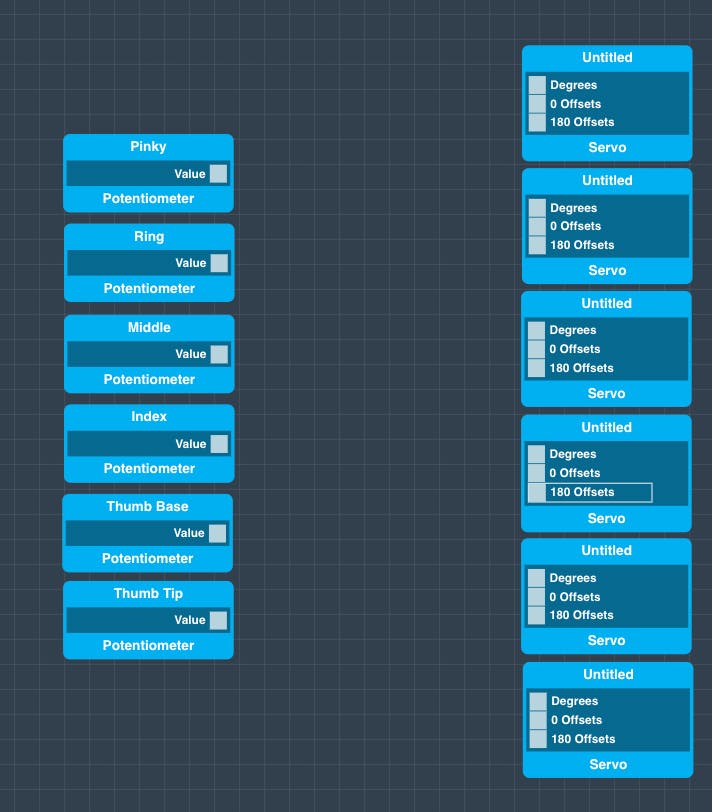
按照上面找到的相同步骤和顺序来命名伺服对象。

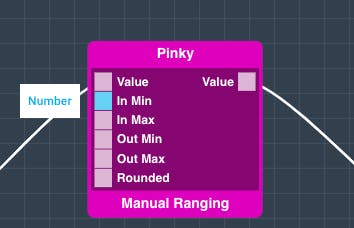
同样,使用搜索栏找到“手动测距”代码对象并将其中的六个拖到画布上。


按照上面找到的相同步骤和顺序命名手动测距对象。
接下来,将电位器值端口连接到端口中的手动量程值,如图所示。
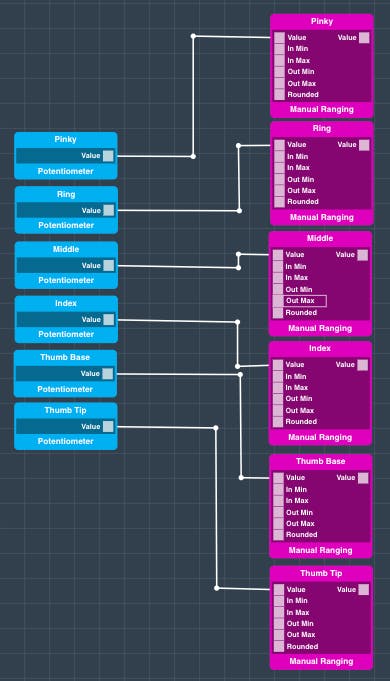
如图所示,手动测距值输出端口连接到伺服度数端口。

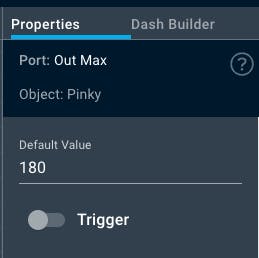
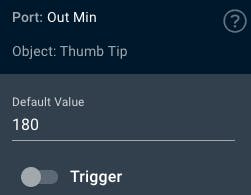
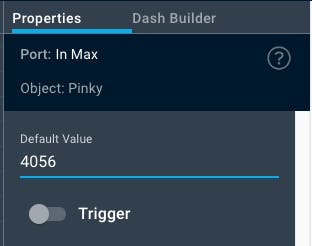
现在,我们将每个手动测距对象的 Out Max 设置为 180。要设置该值,请单击 Out Max 端口,导航到属性面板,将默认值更改为 180,然后保存。对除拇指提示之外的所有手动测距对象执行此操作,我们将此设置为 0。

现在,对于 Thumb Base Manual Ranging 对象,我们将端口设置为 180。我们在此对象上配置与其他手动测距对象相对的 Max/Min 输出端口,因为拇指基础伺服需要在另一个相反的方向上旋转伺服系统。

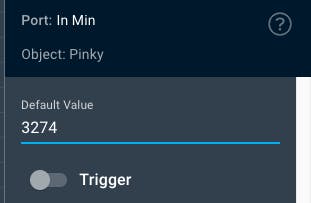
现在我们将为每个手动测距对象设置 In Min 和 In Max 值。伸展位置的模拟值将用于 In Min 值,缩回位置的 和 值将用于 In Max 值。
我们将向您展示如何为小指做这件事,但您需要自己做其余的事情。
在Pinky 手动测距对象上选择In Min Port,在属性面板中输入您的扩展位置模拟值,然后保存。
现在选择同一代码对象上的 In Max 端口,输入您的缩回位置模拟值,然后保存。
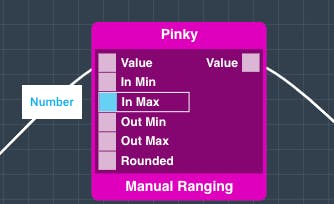
现在,对所有剩余的五个手动测距代码对象重复这些步骤。确保为每个对象使用正确的模拟值,这意味着将环形电位器的模拟值与环形手动测距代码对象一起使用。
最后,保存您的应用程序!
第 4 步:映射应用程序
导航回您的应用程序页面并点击您的 Robot + Exo 应用程序旁边的开始按钮。

应用程序中包含的设备列表将展开。
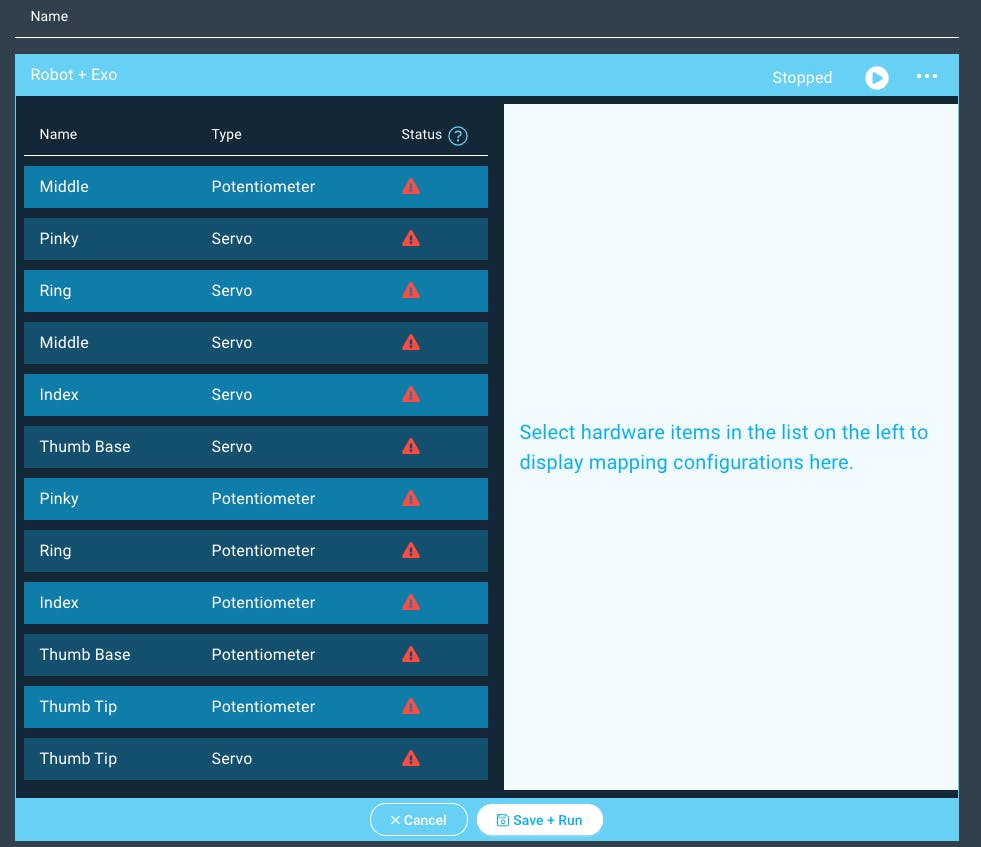
现在,选择 Middle 对象并将 Middle 驱动程序映射到它。
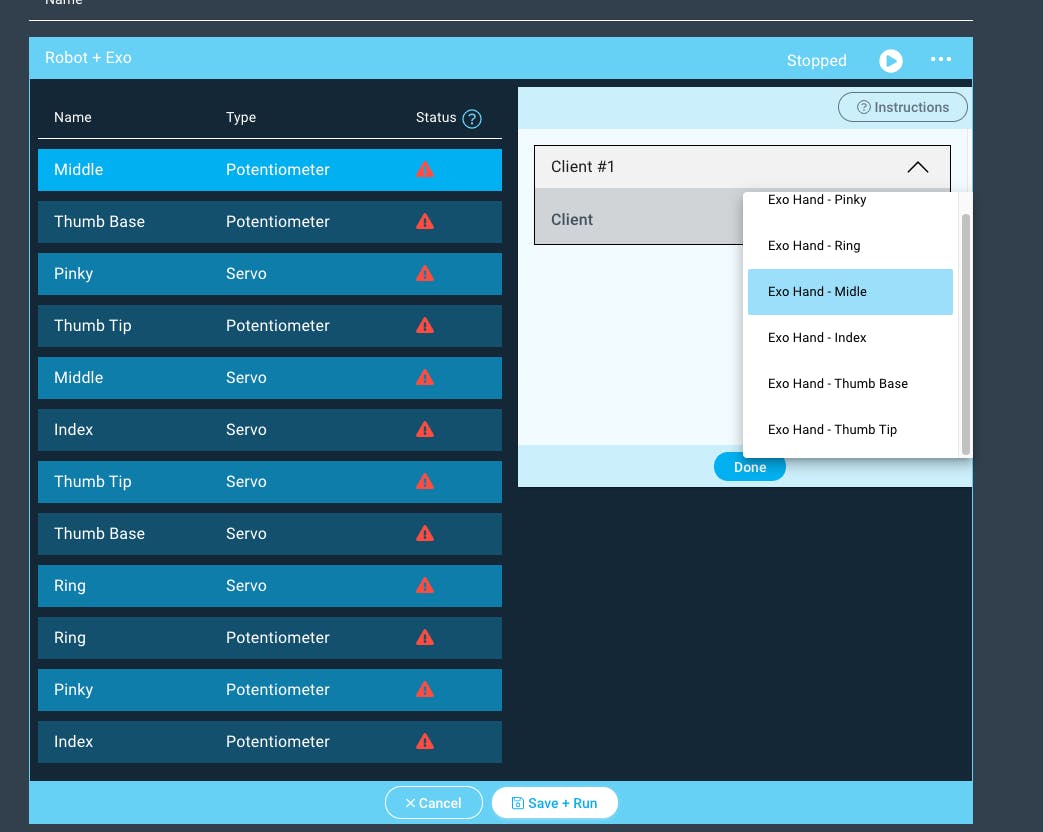
现在遍历其余对象并将它们映射到相应的驱动程序。例如,Ring Potentiometer → Ring,Pinky Servo → Pinky。
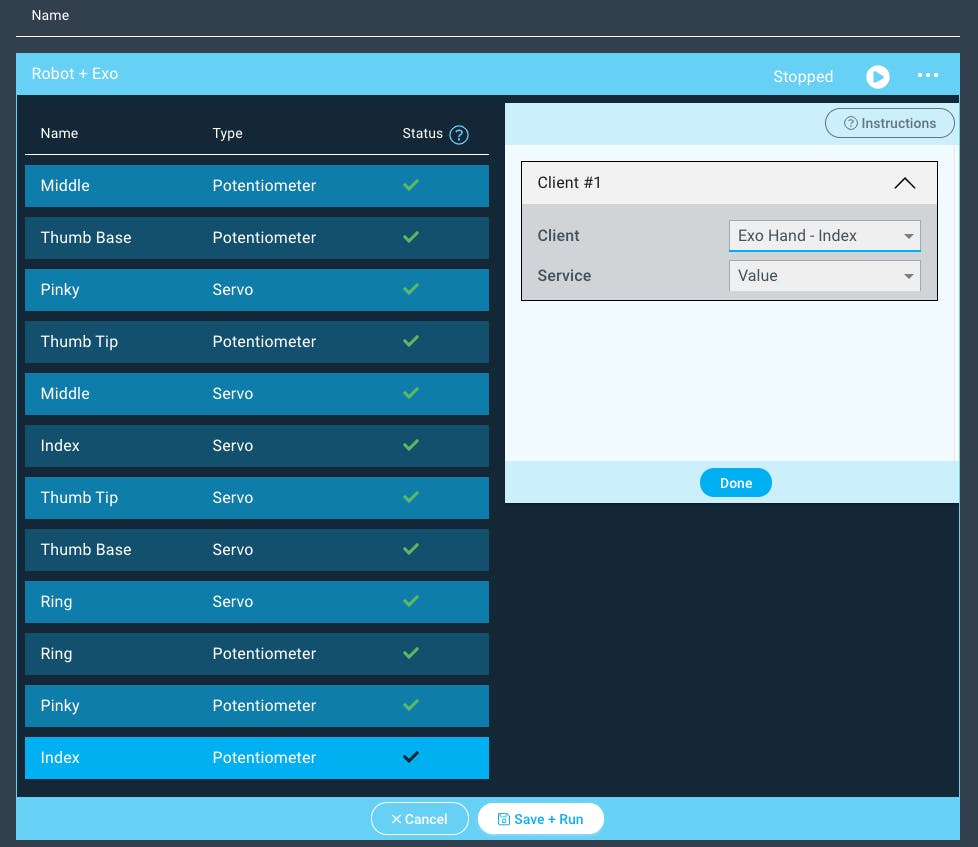
将所有驱动程序映射到对象后,就可以运行应用程序了。
第 5 步:运行应用程序!
点击“保存+运行”,您的应用程序将启动!

第 6 步:使用您的机器人和 Exo 手!
现在,当您移动 Exo Hands 上的手指时,机器人手上的相应手指应该会移动。享受!
链接:
有关此项目的更多信息,请查看:YouBionic Robot + Exo Hands
有关 Quantum 的更多信息以及所需的任何资源,请查看我们的网站
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





