
资料下载


×
一个开源的拟人机器人仿生手系统HRI-hand
消耗积分:5 |
格式:pdf |
大小:4.33 MB |
2021-04-24
Durantsix
分享资料个
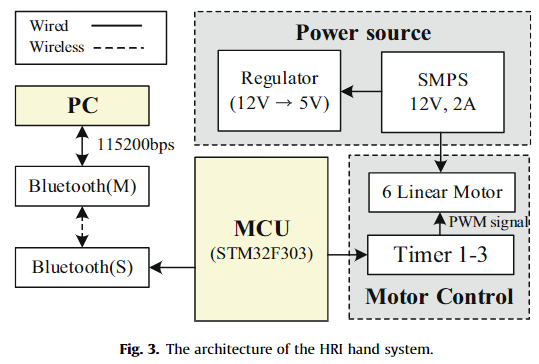
我们提出了一个开源的拟人机器人手系统称为HRI手。我们的机器人手系统开发的重点是合作机器人机械手的末端执行器的作用。HRI-hand是一个研究平台,它可以以比商业终端执行器更低的价格(美联社大约500美元,仅使用3D打印)构建。此外,它被设计为两个四杆机构的欠驱动机制,并提供预成形运动类似于人的手之前,接触到一个物体。还提供了URDF、pythonnode和rviz包来支持Robot操作系统(ROS)。所有的硬件CAD设计文件和软件源代码已经发布,可以很容易地组装和修改。本文提出的系统采用五指结构,但是每个手指都是模块化的,因此可以根据手掌的形状使用不同形状的末端执行器。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






