
资料下载


简单的MPU6050 IMU Arduino机器人更新
陈丽
分享资料个
描述
使用陀螺仪来控制我的项目是我的遗愿清单上的一件大事,但除了获得 IMU 之外,其余的都很难。提取偏航俯仰和滚动值的有效内容的缺乏困扰了我一个多月。经过无数的网站,无数的库和问题,我学会了从陀螺仪中获取数据并在一个简单的项目中使用它,初学者可以轻松完成并为自己省去很多麻烦。
(查看我们的博客 - virginrobotics.blogspot.com以获得惊人的内容。)
按照以下步骤使用 MPU6050 传感器的陀螺角。
1. 获得 6 轴加速度计-陀螺仪传感器后,需要安装一个库。
这是链接:
MPU6050库
https://github.com/jarzebski/Arduino-MPU6050
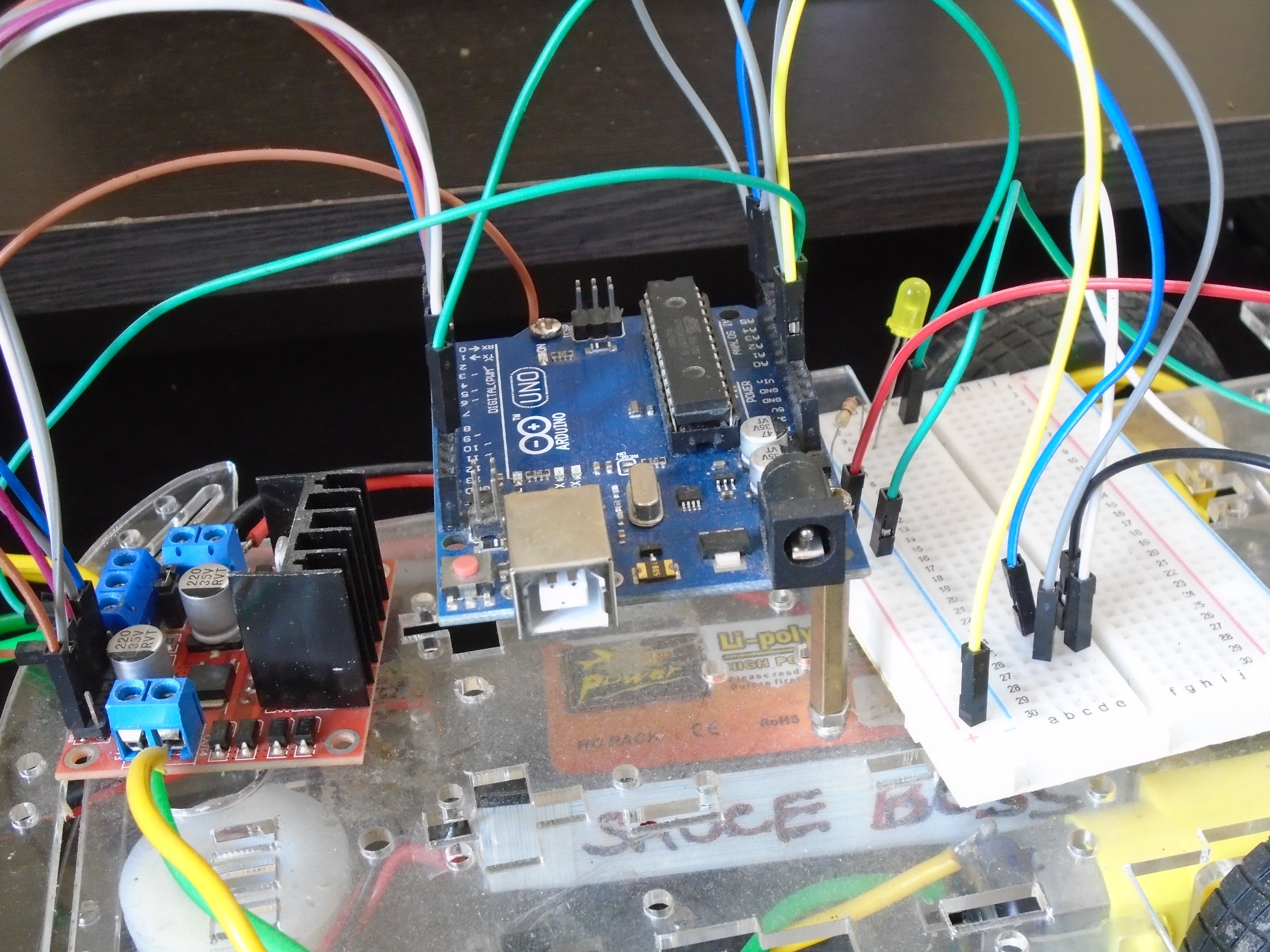
2. 在安装库时,请按照以下方式连接系统
与电机驱动器的连接在代码本身中给出。
埃纳 = 5;
enb = 6;
in1 = 7;
in2 = 4;
in3 = 9;
in4 = 8;
反正在这里:)
与传感器的连接是:
VCC - +5V
地 - 地
SDA-A4
SCL-A5
注意 - 从这里开始,我们称机器人 Barney。

3. 上传代码并将您的 Barney 放在地板上,让传感器校准
并将放置它的方向设置为 0 度。
有趣的孩子的时间......
一旦这样做了,巴尼可能会左右抽搐,但没关系。现在尝试将机器人推向不同的方向,但它会回到原来的方向。
这是巴尼的演示。
更新 -
如您所见,机器人在返回面向墙壁时开始抽搐。问题已解决,看看如何点击此链接 - VirginRobotics
这是一个视频,显示了修复的不同之处。请注意机器人在返回面对墙壁后如何不抽搐。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




